

Processing method for speed feedforward and torque feedforward in CANopen servo system
A processing method and servo system technology, applied in the direction of electrical program control, digital control, etc., to achieve better dynamic following performance, excellent dynamic following performance, and improved dynamic following performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
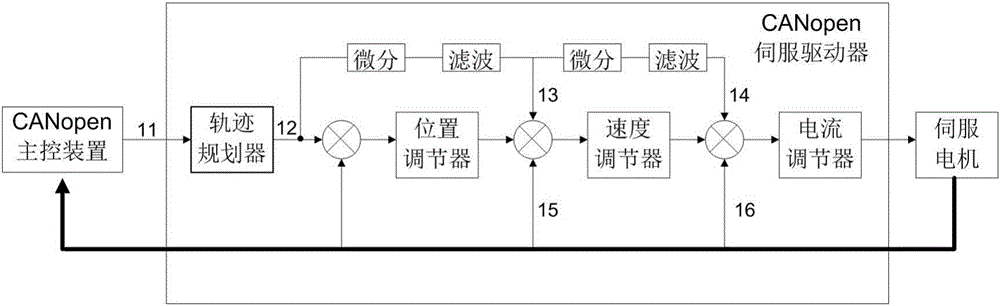
[0040]The specific embodiment of the present invention provides a kind of processing method of speed feed-forward and torque feed-forward in CANopen servo system, described CANopen servo system comprises CANopen master control device, CANopen servo driver and servo motor, has track in servo driver planner, position regulator, speed regulator and current regulator.
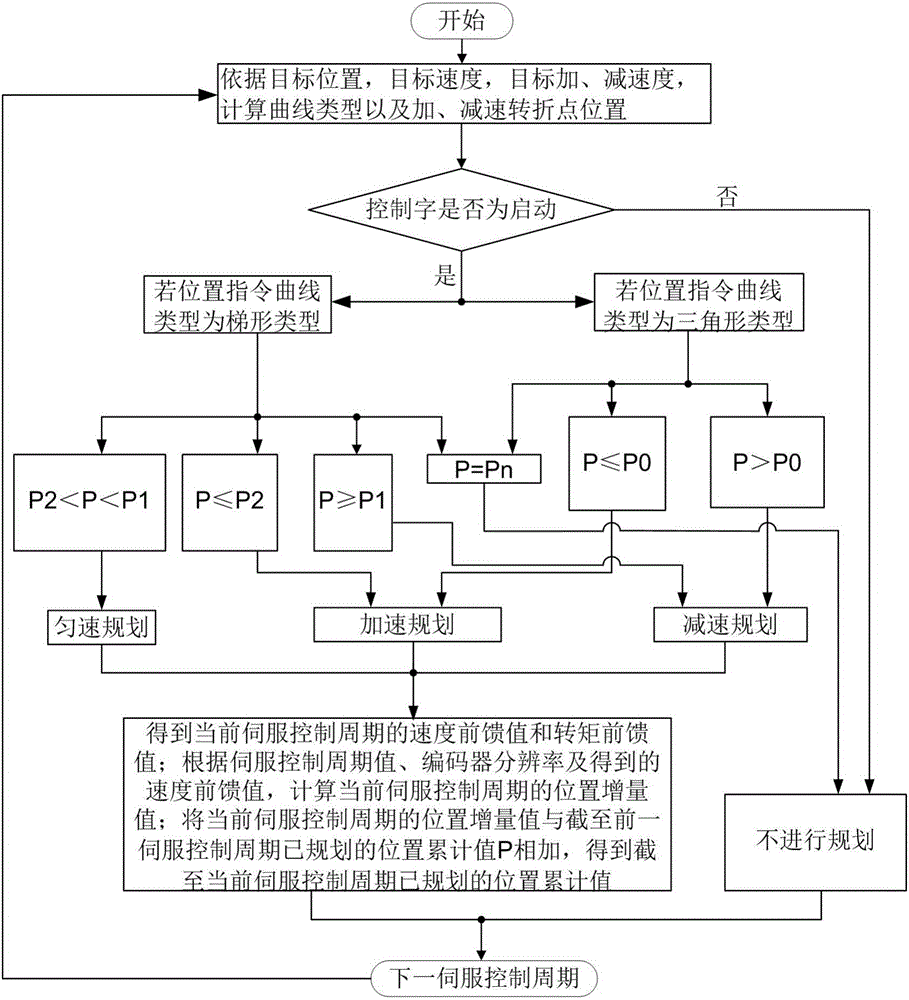
[0041] refer to image 3 , the processing method is to perform the following steps through the trajectory planner:
[0042] Step S1, receiving a target control command from the master control device. The target control command includes target position, target speed, target acceleration, target deceleration, control mode and control word.
[0043] Step S2 , according to the received target control command, specifically according to the target position, target speed, target acceler...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More