Device and method for controlling a robotic arm
A technology of robotic arms and control devices, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as complex monitoring methods, reduced production efficiency of robotic arms, and difficulties in robotic arms
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0030] In order to achieve the above-mentioned purpose, the technical means and effects thereof adopted by the present invention are now given as preferred embodiments, and are described as follows in conjunction with the accompanying drawings.
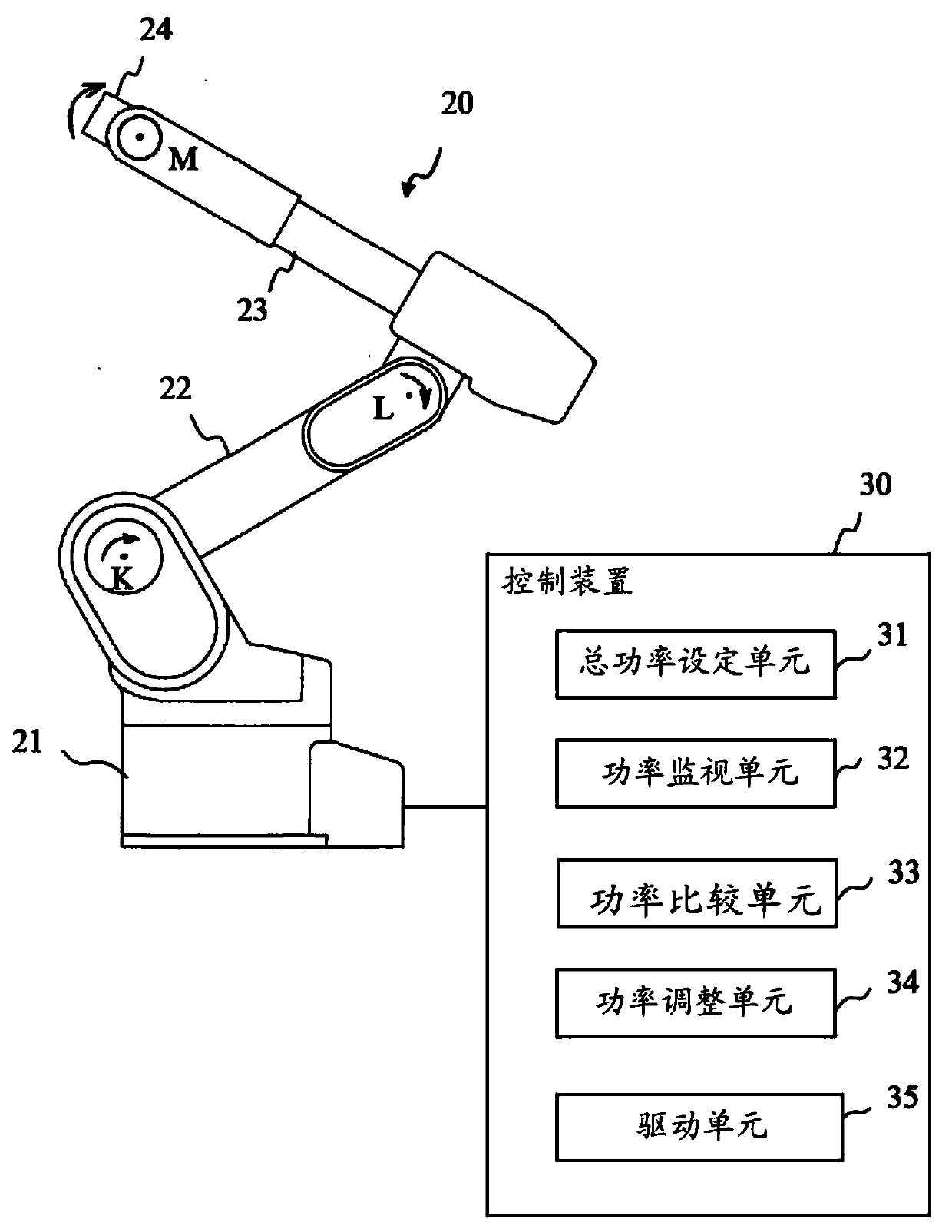
[0031] Please also see figure 1 and figure 2 , figure 1 It is the control schematic diagram of the robot arm of the present invention, figure 2 It is a schematic diagram of the rotational power of the robotic arm of the present invention. The movement of the robot arm 20 of the present invention is mainly controlled by the control device 30 . Wherein the robot arm 20 is provided with a first actuating shaft K on the base 21 to rotate the first arm 22, a second actuating shaft L is provided on the first arm 22 to rotate the second arm 23, and a third arm 22 is provided on the second arm 22. The actuation shaft M turns the end portion 24 . Although the present embodiment is illustrated with a three-axis robot arm, the present i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More