

Humanoid robot gait control method based on model correlated reinforcement learning
A humanoid robot and reinforcement learning technology, which is applied in the field of humanoid robot gait control based on model-related reinforcement learning, can solve the problems that the PID controller cannot perfectly meet the system control requirements, the humanoid robot system is complicated, and the space is large
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The present invention will be further described below in conjunction with specific examples.
[0050] The gait control method of a humanoid robot based on model-related reinforcement learning described in this embodiment comprises the following steps:
[0051] 1) Define a reinforcement learning framework for the stability control task before and after walking of a humanoid robot;
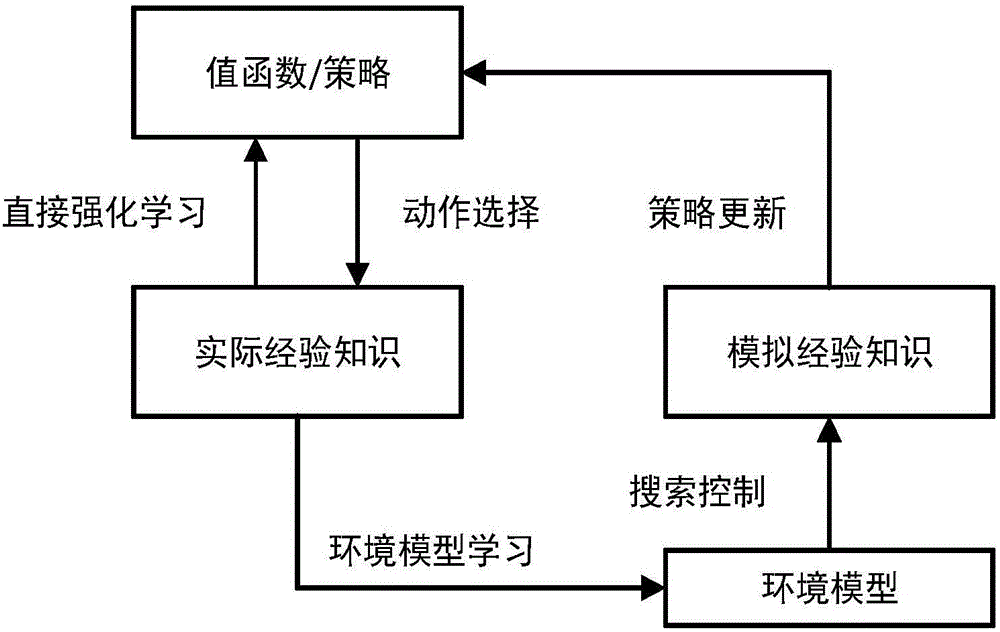
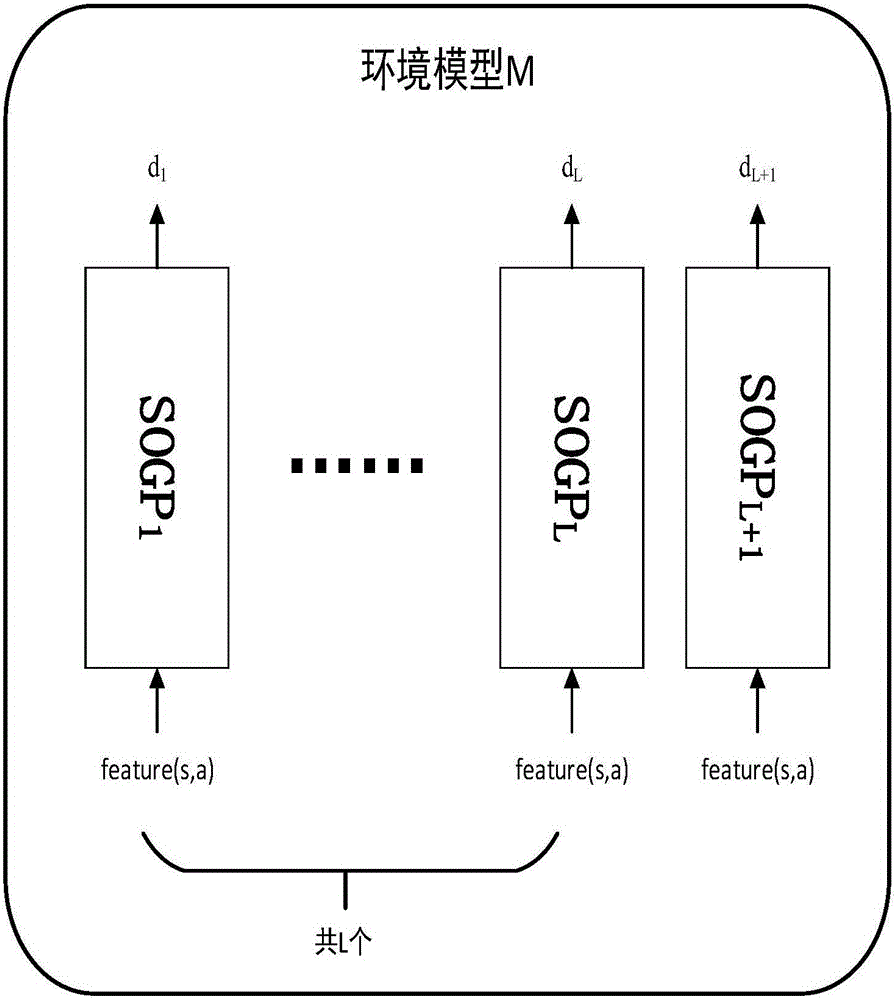
[0052] 2) Gait control of humanoid robots using model-dependent reinforcement learning methods based on sparse online Gaussian processes;
[0053] 3) Use the PID controller to improve the action selection method of the reinforcement learning humanoid robot controller, and the improvement operation is to use the PID controller to obtain the optimal initial point for the action selection operation of the reinforcement learning controller.
[0054] In the present invention, reinforcement learning is used for the stability control of the humanoid robot before and after walking. Firstly, the fram...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More