

Unmanned vehicle planning control method based on topology map
A topological map and planning control technology, applied in two-dimensional position/channel control, vehicle position/route/height control, non-electric variable control, etc., can solve problems such as difficult integration of sparse environmental maps
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] In order to better understand the technical solution of the present invention, further description will be made below in conjunction with the accompanying drawings.
[0066] A method for planning and controlling an unmanned vehicle based on a topological map, comprising the following steps: a method for planning and controlling an unmanned vehicle based on a topological map, comprising the following steps:
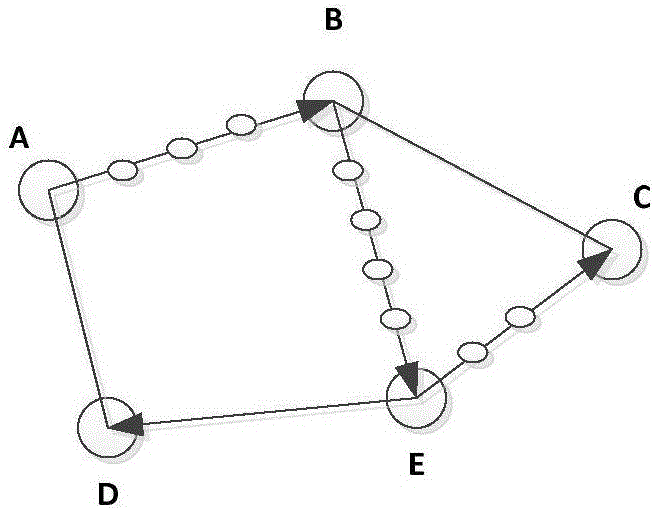
[0067] Step 1, the unmanned vehicle builds the map multiple times and stores the key frame coordinate sequence. The process of building the map each time is as follows: start the unmanned vehicle, the unmanned vehicle is equipped with a binocular camera, and set the unmanned vehicle to random exploration The automatic operation mode of the environment; start the binocular camera, collect the environmental image, build a sparse visual feature map, and store the key frame pose sequence in the form of a text file to the local disk of the on-board computer;
[0068] The...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More