

Control method for bionic flapping-wing aerial robot
A flying robot and control method technology, applied in attitude control, adaptive control, general control system and other directions, can solve the problems of complex dynamic model and few control algorithms.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] In order to make the technical problems, technical solutions and advantages to be solved by the present invention clearer, the following will describe in detail with reference to the drawings and specific embodiments.
[0066] In order to better understand this embodiment, some abbreviations in this article are illustrated first, for example, q r is q r Short form of (t), yes the shorthand form of yes The abbreviated form of τ r is τ r Short form of (t), τ t for τ t Short form of (t), x r1d is x r1d The abbreviation form of (t), other similar abbreviations will not be explained one by one.
[0067] In this paper, the form is represents the first derivative, Indicates the second order derivative, unless otherwise specified, it is derived with respect to time t, for example, is the first derivative of w with respect to time t.
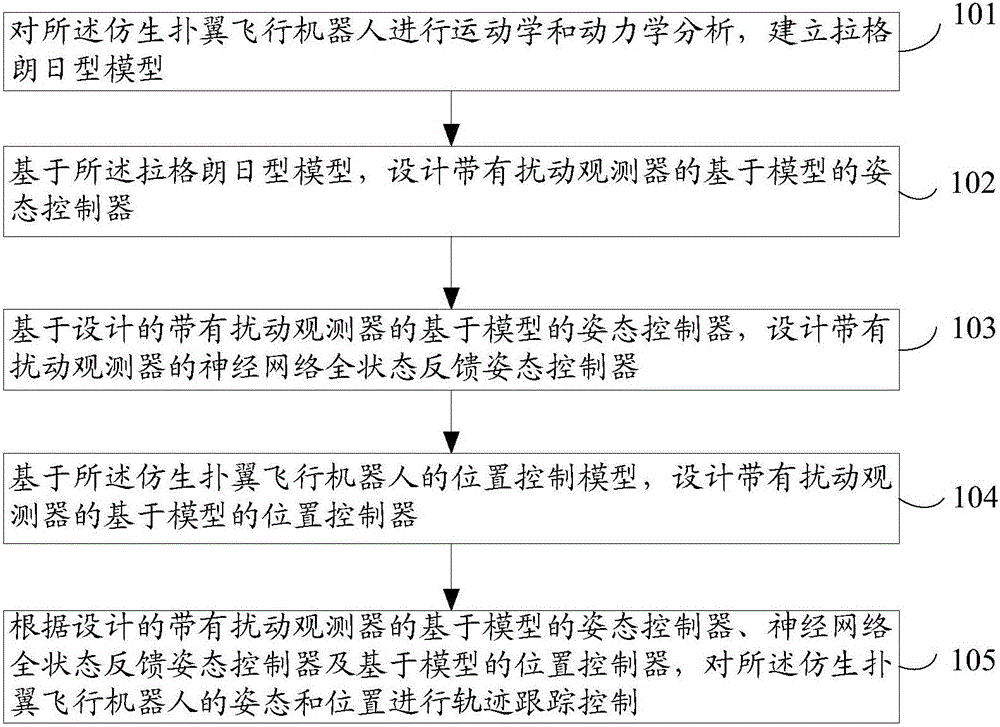
[0068] see figure 1 As shown, the control method for the bionic flapping-wing flying robot provided by the embodiment of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More