Vehicle control method and device
A vehicle control and vehicle technology, which is applied in the field of vehicle engineering, can solve problems such as excessive operation, accidents, and insufficient operation, so as to reduce the probability of misoperation and improve safety.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
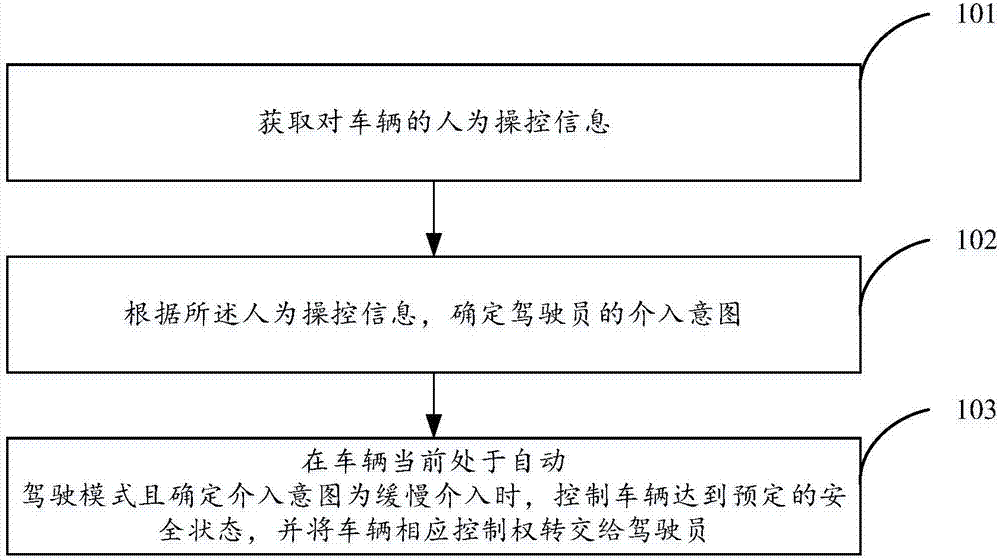
[0032] see figure 1 , which is a flowchart of a vehicle control method provided in Embodiment 1 of the present invention, the method includes:
[0033] Step 101, obtaining information on human manipulation of the vehicle;
[0034] Step 102. Determine the driver's intervention intention according to the human manipulation information;
[0035] Step 103: When the vehicle is currently in the automatic driving mode and it is determined that the intervention intention is slow intervention, control the vehicle to reach a predetermined safe state, and transfer the corresponding control right of the vehicle to the driver.
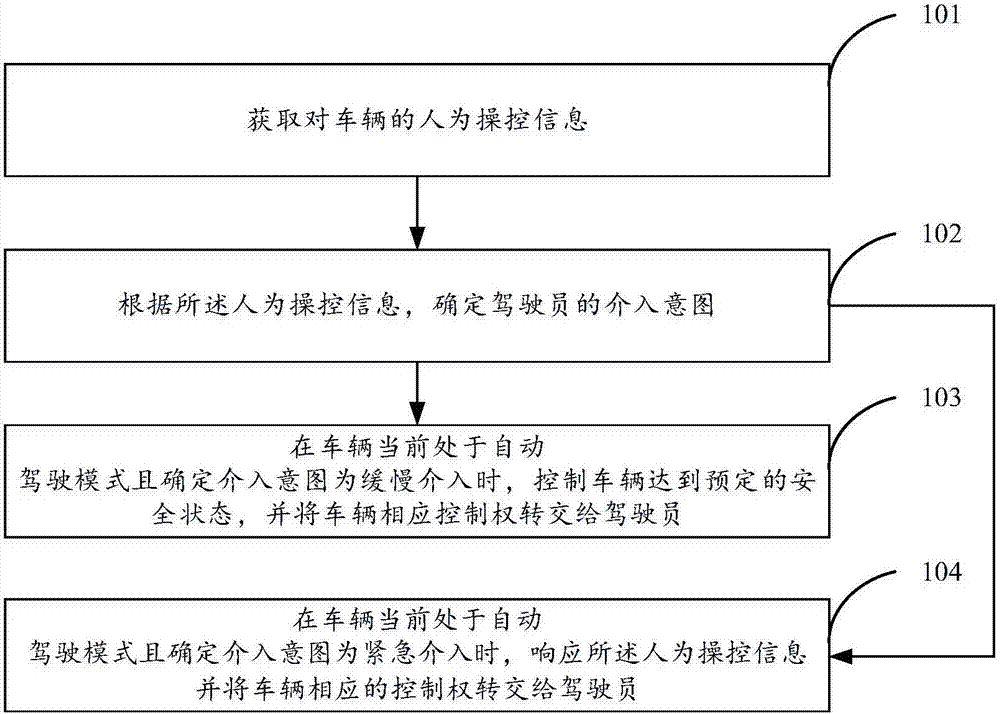
[0036] Preferably, in order to avoid the problem that the vehicle cannot respond when human intervention is required in an emergency or unexpected situation in the automatic driving mode, thereby causing a vehicle accident, the embodiment of the present invention, in the figure 1 In the method flow shown, also comprise following step 104, as figure 2 Shown:
...
Embodiment 2
[0051] Embodiment 2, vehicle longitudinal control
[0052] In the second embodiment of the present invention, it is possible to control only the acceleration of the vehicle, to control only the deceleration of the vehicle, or to control the acceleration and deceleration of the vehicle.
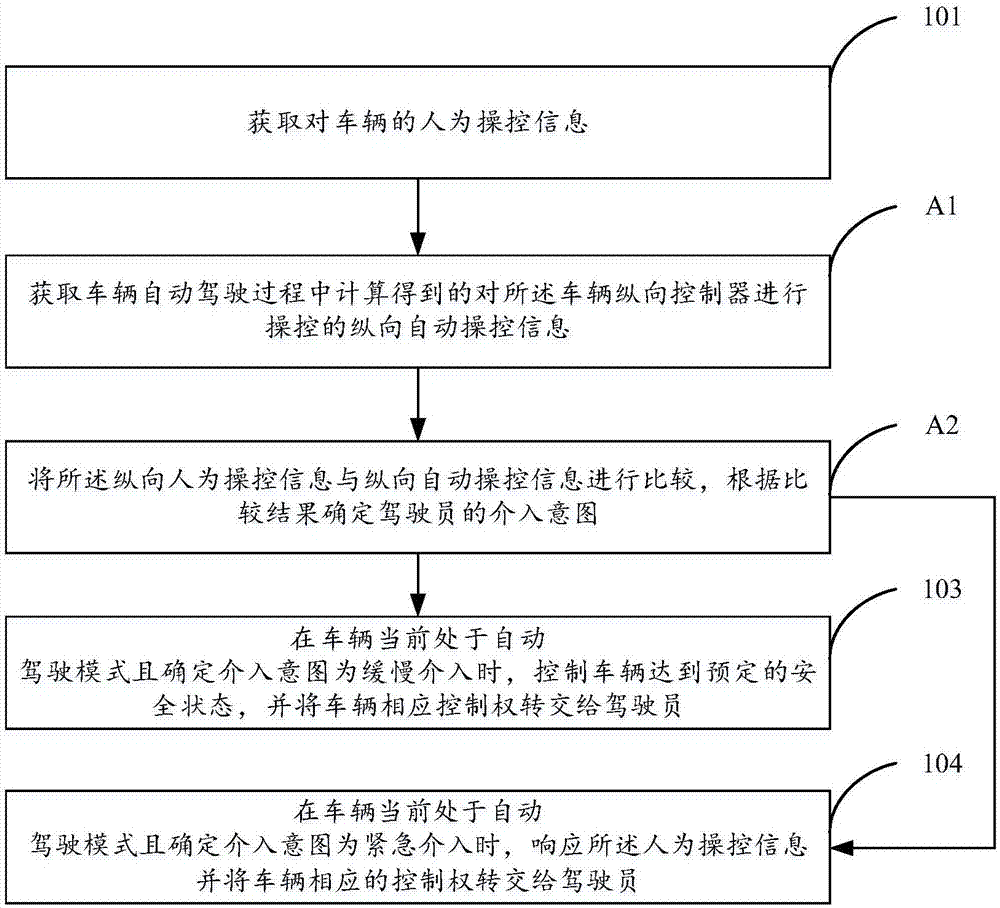
[0053] aforementioned figure 1 and figure 2 In the shown method, the aforementioned human manipulation information includes longitudinal human manipulation information for manipulating the longitudinal controller of the vehicle. In the foregoing step 102, according to the human manipulation information, the driver's intervention intention is determined, which can be specifically realized through the following steps A1 to A2, such as image 3 shown, including:
[0054] Step A1. Obtain the longitudinal automatic control information calculated and obtained during the automatic driving process of the vehicle to control the longitudinal controller of the vehicle.
[0055] In the embodiment of ...
example 1
[0068] Example 1. Deceleration control
[0069] In Example 1, the longitudinal controller is a brake controller, the aforementioned first value represents the value of the braking degree of the driver manipulating the brake controller for braking, and the second value is calculated by the unmanned driving control unit is a value representing the degree of braking by manipulating the brake controller. The braking degree may refer to the opening and closing degree of the brake pedal, the deceleration value or the engine torque value, which is not strictly limited in this application.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com