

Real-time traffic conflict early warning method based on high accuracy positioning and vehicle-vehicle cooperation
A real-time traffic, high-precision technology, applied in the field of traffic safety, can solve problems such as inability to realize real-time vehicle information transmission and processing, failure to consider the microscopic process of turning driving behavior, and inability to adapt to high-frequency dynamic traffic environment changes
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
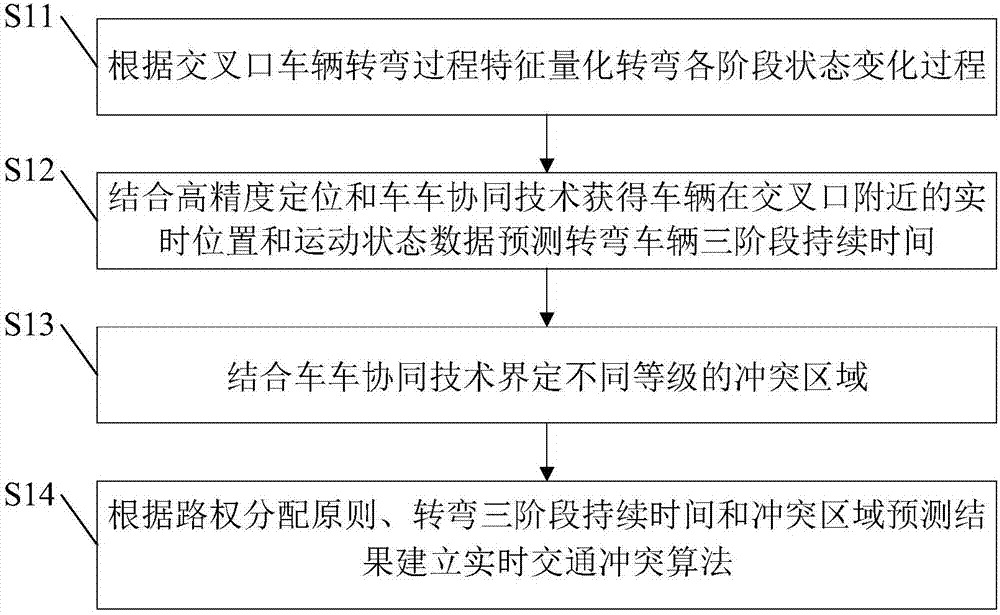
[0161] Such as figure 1 The flow chart of the concrete example of the shown real-time traffic conflict algorithm:
[0162] S11 Quantify the state change process of each stage of turning according to the characteristics of the turning process of the vehicle at the intersection. During the first stage, the driver keeps changing the angle of the steering wheel, and the angular velocity of the vehicle increases continuously. Under the action of the centripetal force, the lateral velocity gradually increases, while the longitudinal velocity decreases with the increase of the braking force. The initial process of entering the turning state from the straight-going state. The second stage is the middle process of turning. The driver no longer changes the steering wheel angle and braking force. The driving state of this stage can be regarded as a circular motion with constant angular velocity, increased lateral velocity, and constant longitudinal velocity. The third stage is the fina...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More