

A robust invariant set control method for preventing oversteering of four-wheel independent drive electric vehicles
A four-wheel independent drive and oversteering technology, which is applied in the field of yaw stability control of electric vehicles, can solve the problems of lack of methods to prevent oversteering, and achieve the effect of preventing oversteering
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings, but it is not limited thereto. Any modification or equivalent replacement of the technical solution of the present invention without departing from the spirit and scope of the technical solution of the present invention should be covered by the present invention. within the scope of protection.
[0021] The invention provides a robust invariant set control method for preventing over-steering of a four-wheel independent drive electric vehicle, and the specific implementation steps are as follows:
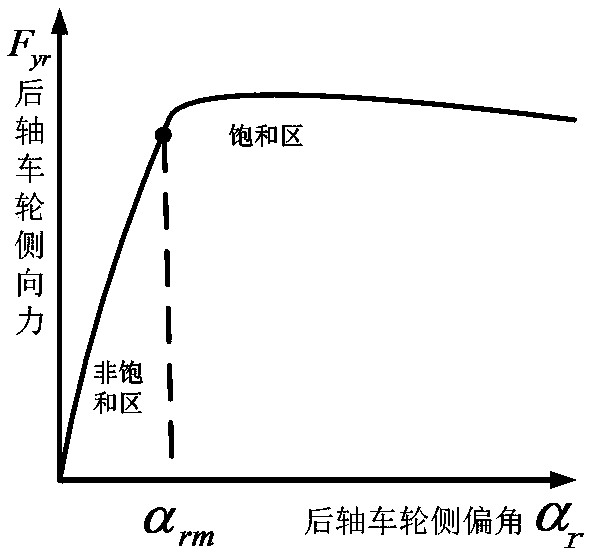
[0022] Step S1: Determine the rear axle slip angle constraint value α to prevent the vehicle rear axle from saturating the lateral force from the experimental data m .
[0023] Depend on figure 1 It can be seen that the rear axle lateral force has a nonlinear relationship with the slip angle and has a saturation characteristic. determined alpha m i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More