

Cooperative target and non-cooperative target coexistence alternate Kalman space registering method
A non-cooperative target and cooperative target technology, applied in the field of multi-mobile platform sensor space registration, can solve problems such as poor estimation effect, and achieve the effects of high timeliness, high estimation accuracy and good timeliness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
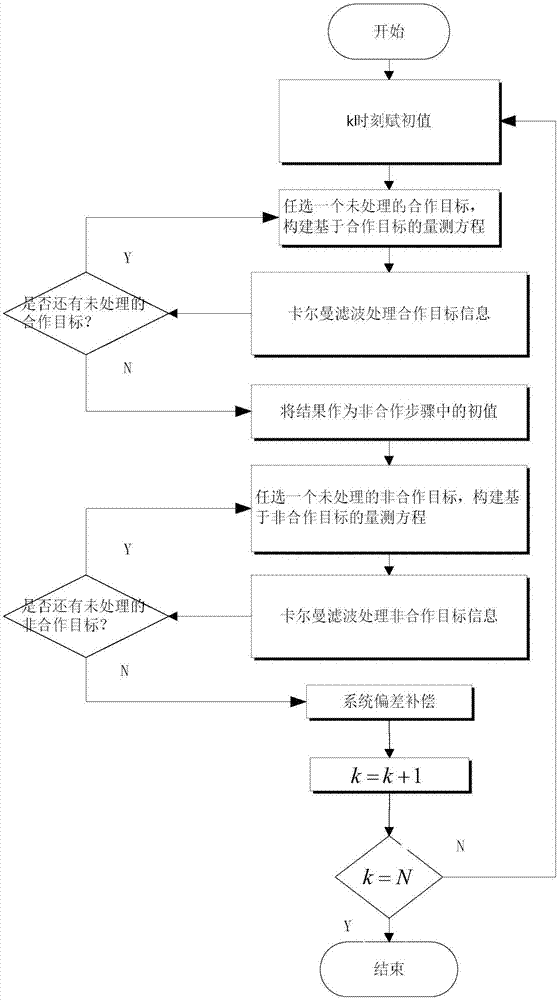
[0014] refer to figure 1 . The implementation process of the Alternate Kalman space registration method for the coexistence of cooperative and non-cooperative targets is as follows. There are currently two mobile platforms 1 and 2, each carrying a sensor, called A and B, using the method proposed by the present invention to simultaneously perform spatial registration on the measurement data of the sensors A and B. According to the present invention, under the earth-centered earth-fixed coordinate system, according to the difference in the number of filter beats k, the initial value of the filter is assigned to the measurement system deviation vector and the filter estimation covariance of the sensors A and B at time k; The target information establishes the spatial registration measurement model of the measurement data of sensors A and B on different platforms, specifically including the construction of a measurement equation in which the cooperative target is only observed b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More