Control device, robot, and robot system
A control device and robot technology, applied in general control systems, control/regulation systems, program-controlled manipulators, etc., can solve problems such as differences, many operations, and long time, and achieve the effect of accurate operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] Hereinafter, the control device, robot, and robot system of the present invention will be described in detail based on preferred embodiments shown in the drawings.
[0061] robot system
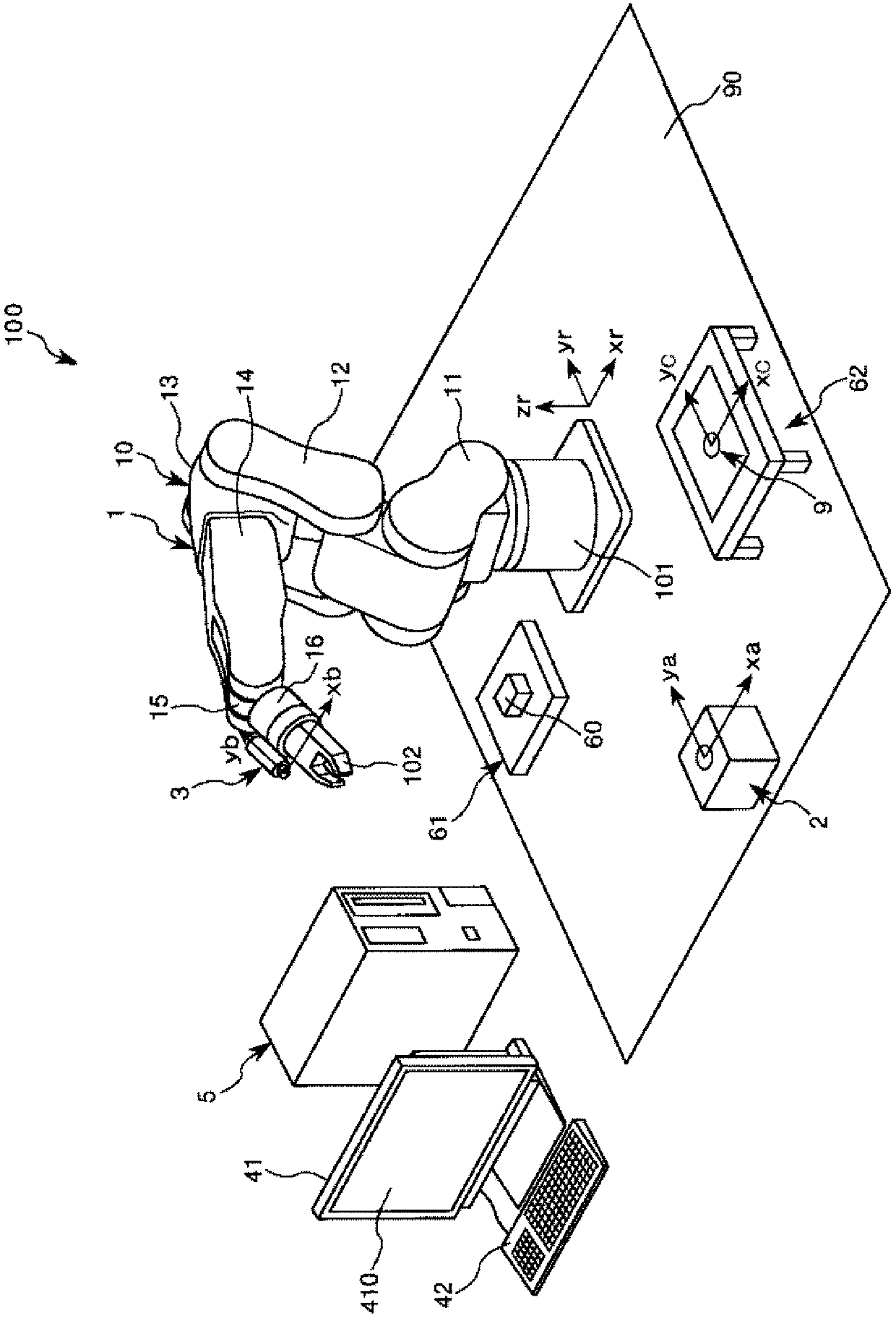
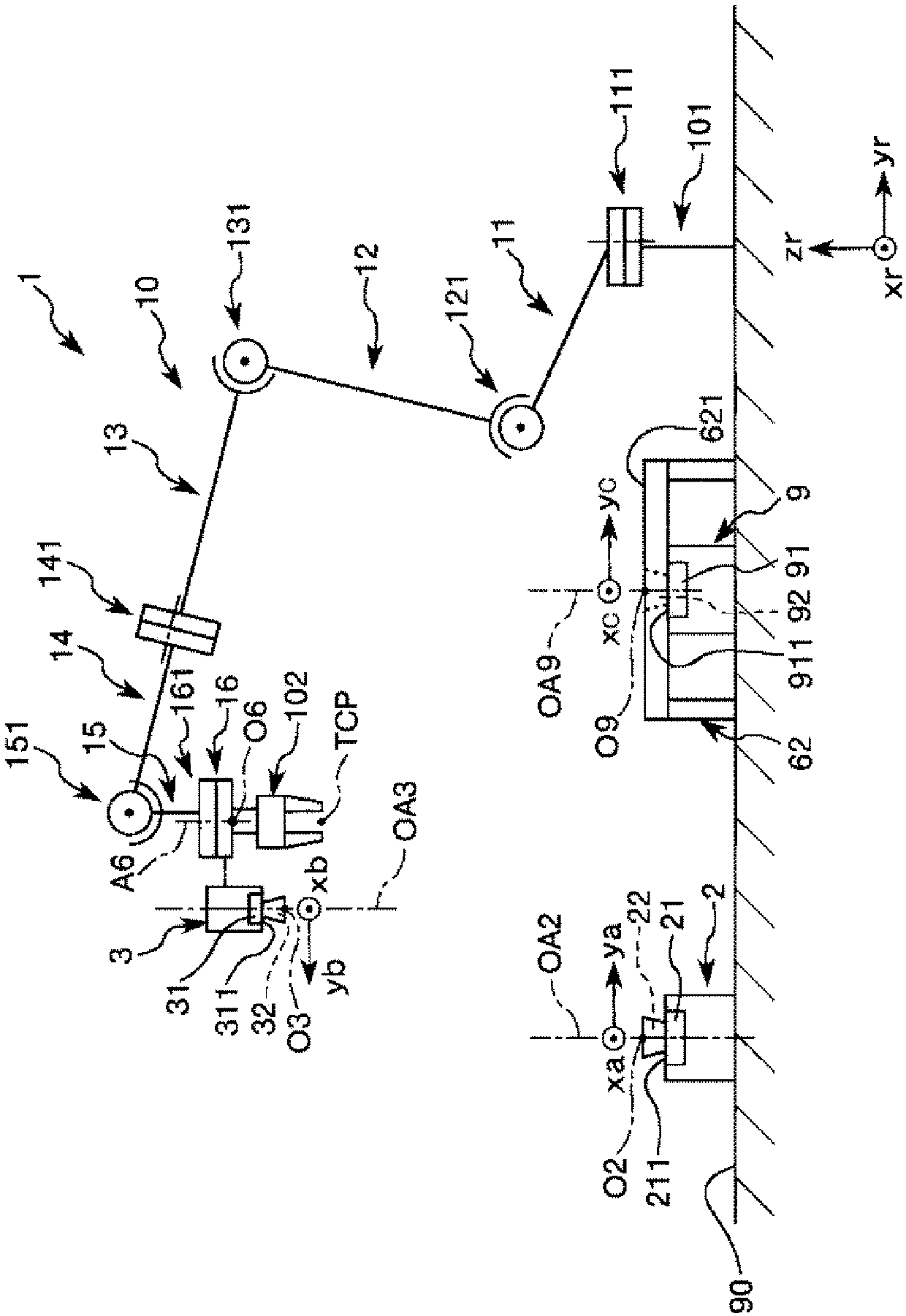
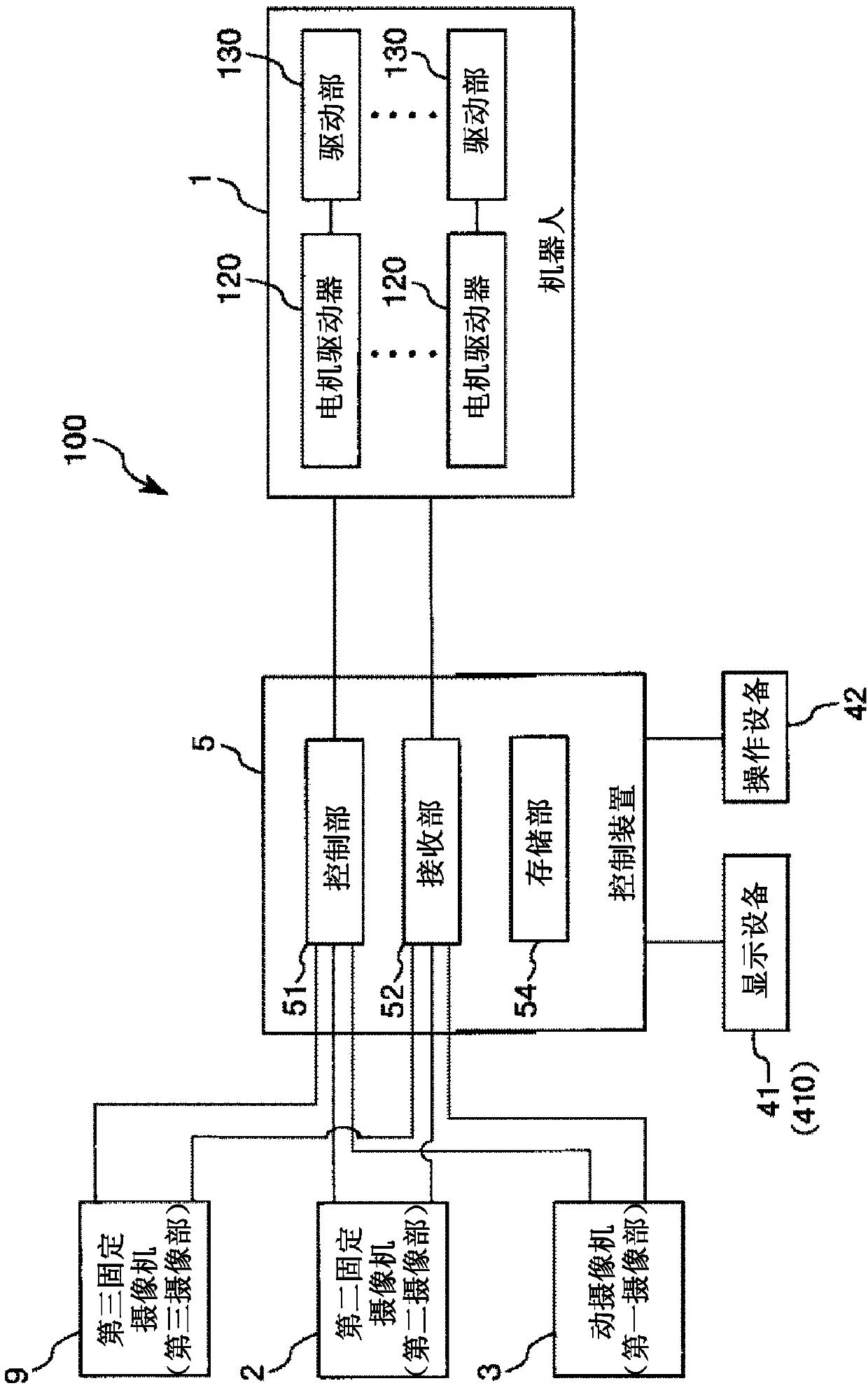
[0062] figure 1 It is a schematic perspective view showing the robot system according to the preferred embodiment of the present invention. figure 2 yes figure 1 A schematic diagram of the robot is shown. image 3 yes figure 1 A block diagram of the robotic system is shown. Figure 4 is expressed in image 3 Shown is a diagram of a window displayed in a screen that the display device has.
[0063] It should be noted that, in the following, for the convenience of explanation, the figure 2 The upper side is referred to as "upper" or "upper", and the lower side is referred to as "lower" or "below". Additionally, the figure 2 The up and down direction in the graph is defined as the "vertical direction", the surface intersecting the vertical direction is defined as the "horizont...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap