

Robot obstacle avoidance behavior learning and target searching method based on deep belief network
A deep belief network and target search technology, applied in the field of automatic obstacle avoidance behavior learning and target search, can solve the problem of less research on automatic obstacle avoidance ability learning of single RGB-D camera robot, and achieve good automatic obstacle avoidance learning ability, The effect of high cost feasibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further described below in conjunction with the accompanying drawings.
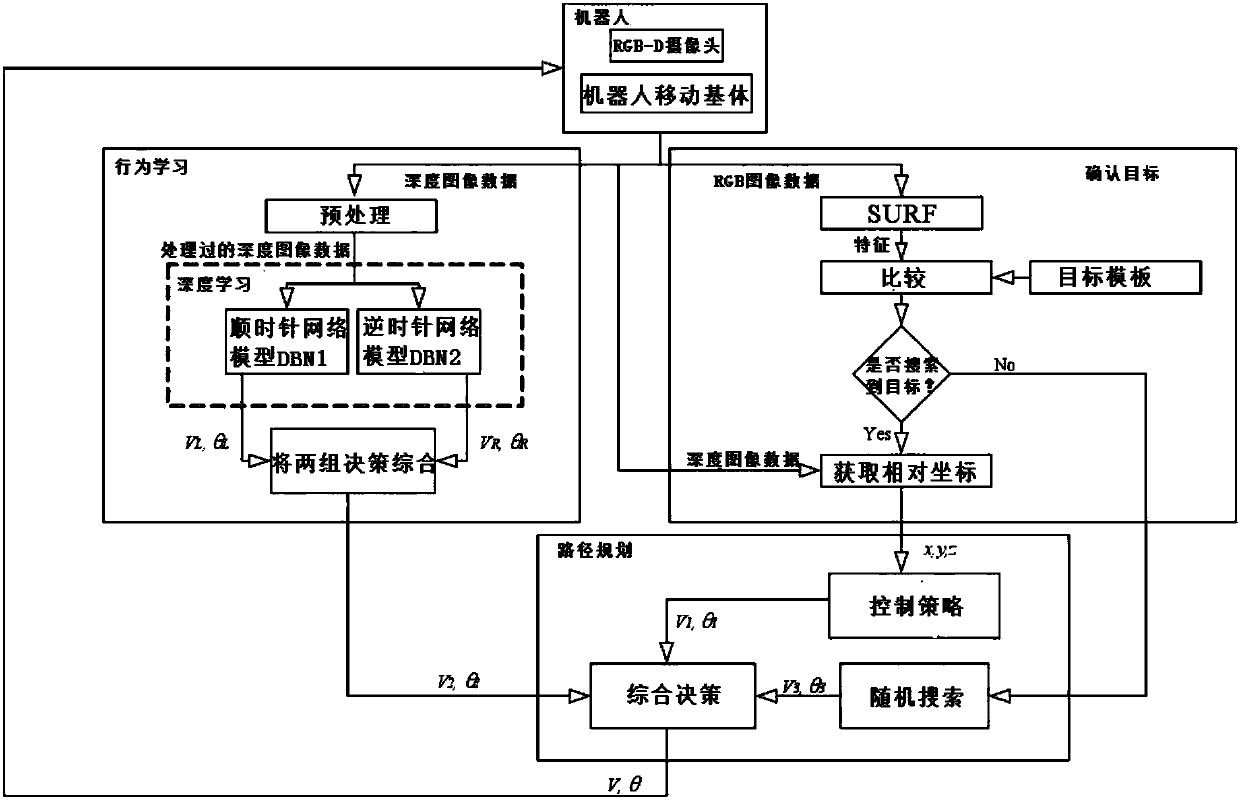
[0031] as attached figure 1 The shown robot obstacle avoidance behavior learning and target search method based on the deep belief network, the robot includes a robot mobile substrate and an RGB-D camera installed on the robot mobile substrate, and the specific steps are as follows:
[0032] Step 1: Manipulate the robot to avoid obstacles in the environment, and obtain the RGB image data, depth image data, and linear velocity and angular velocity data of the robot's moving substrate in real time in the field of view of the RGB-D camera; the specific operation is: the robot is passively controlled in the environment Carry out automatic obstacle avoidance and random search in the clockwise and counterclockwise directions, and acquire RGB image data, depth image data, and linear velocity and angular velocity data of the robot's moving substrate in real time during the pro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More