A method for generating multi-rotor UAV flight trajectories based on second-order cone programming
A multi-rotor UAV, second-order cone planning technology, applied in the direction of instruments, three-dimensional position/course control, control/regulation system, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
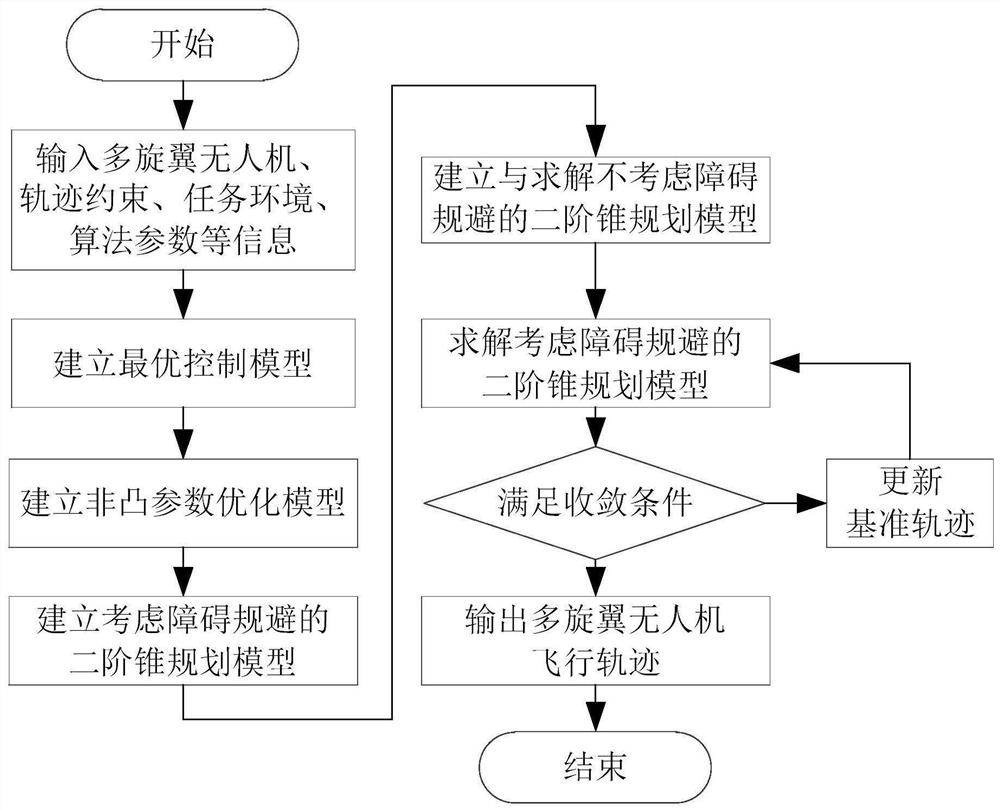
[0078] This embodiment discloses a method for generating a flight trajectory of a multi-rotor UAV based on second-order cone programming. The specific implementation steps are as follows:
[0079] Step 1: Input multi-rotor UAV parameter information, trajectory constraint information, task environment information and algorithm parameter information.
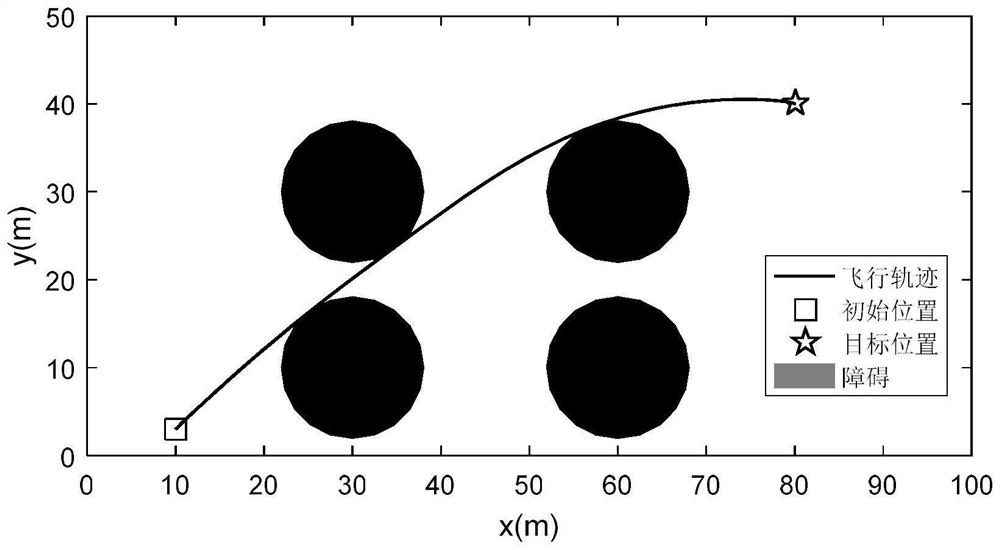
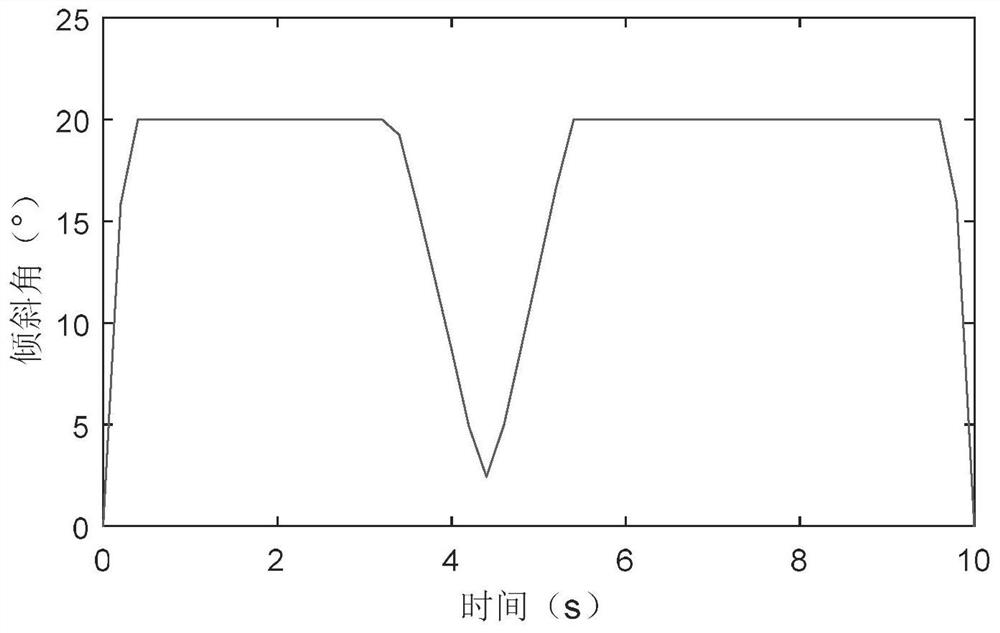
[0080] Set the mass of the drone to 1.5kg, the maximum thrust to 30N, the maximum allowable tilt angle to 20°, and the initial position to be (10m, 3m, 20m) T , the initial velocity is (0m / s,0m / s,0m / s) T , the target position is (80m, 40m, 30m) T , the target velocity is (0,0,0) T , the initial time of the UAV is 0s, the terminal time is 10s, and the lower boundary of the position is (0m, 0m, 0m) T , the position upper boundary is (100m, 50m, 100m) T , the speed lower boundary is (-20m / s,-20m / s,-4m / s) T , the upper boundary of the speed is (20m / s, 20m / s, 4m / s) T . The environment contains 4 obstacles, and their positions ar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com