

A lower limb rehabilitation exoskeleton system and walking control method thereof
An exoskeleton and lower limb technology, applied in the field of lower limb rehabilitation exoskeleton system and its walking control, can solve problems such as instability, falls, lower limb muscle weakness, etc., and achieve the effect of ensuring walking stability, eliminating lateral overturning moment, and reducing burden
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be further described below in conjunction with embodiment and accompanying drawing.
[0027] Example of an exoskeleton system
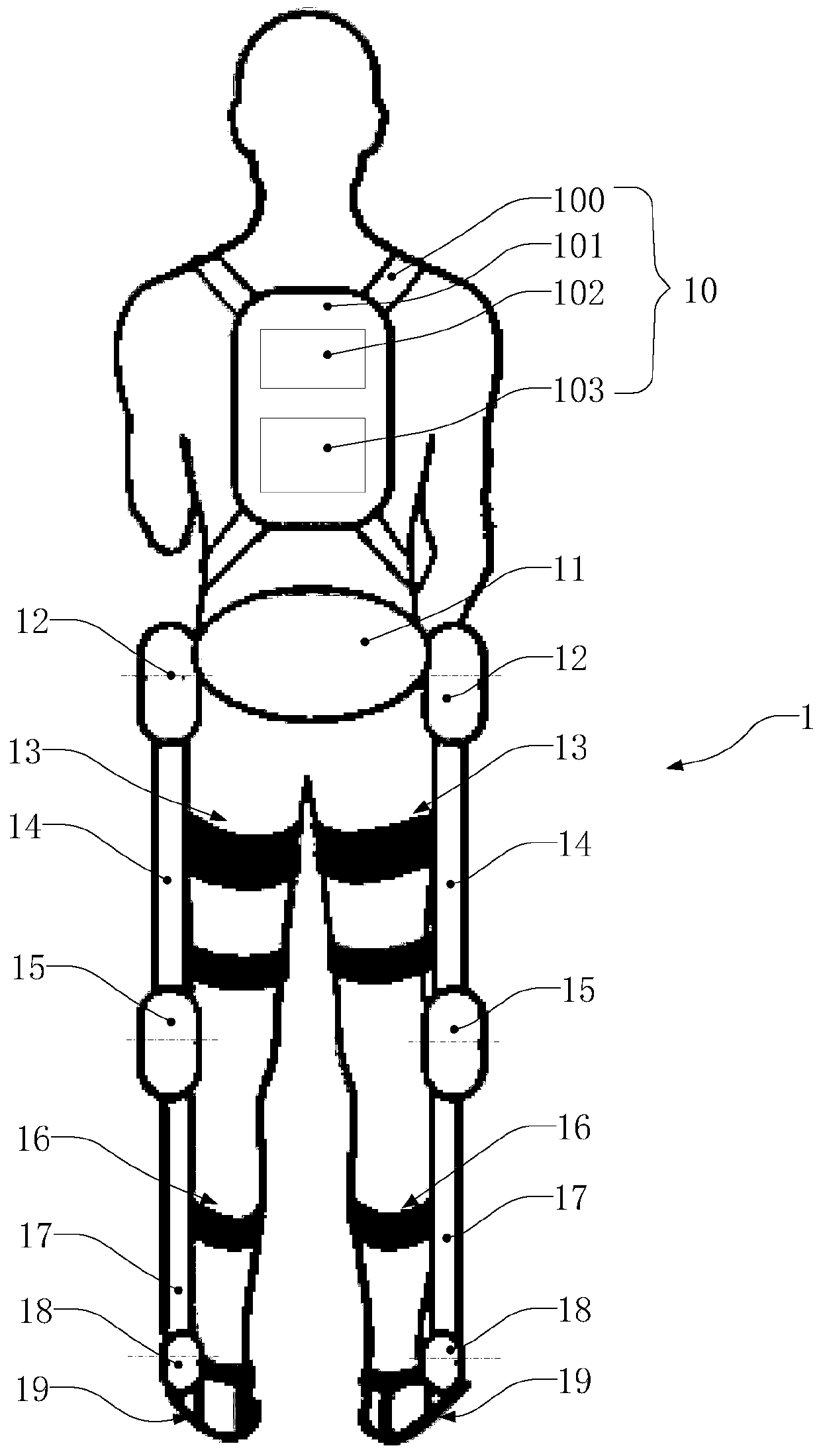
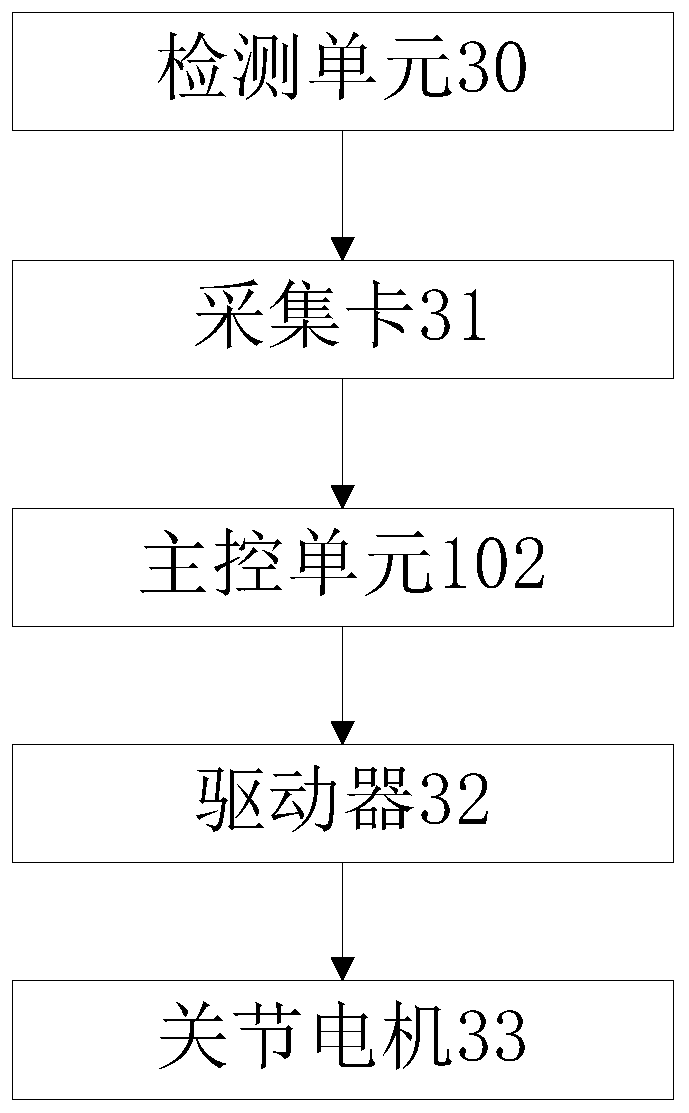
[0028] see Figure 1 to Figure 3 , the exoskeleton system 1 of the present invention includes a control unit, a detection unit that inputs a detection signal to the control unit, and an exoskeleton controlled by the control unit.
[0029] Such as figure 1 As shown, the exoskeleton system includes a control backpack 10 worn on the body of the exoskeleton wearer. The control backpack 10 includes a backpack strap 100, a backpack bag 101 and a power supply battery 103 and a main control unit 102 placed in the backpack bag 101. The main control The unit 102 constitutes the control unit in this embodiment, the main control unit 102 includes a processor and a memory, and the power supply battery 103 supplies power for the normal operation of the entire exoskeleton system.
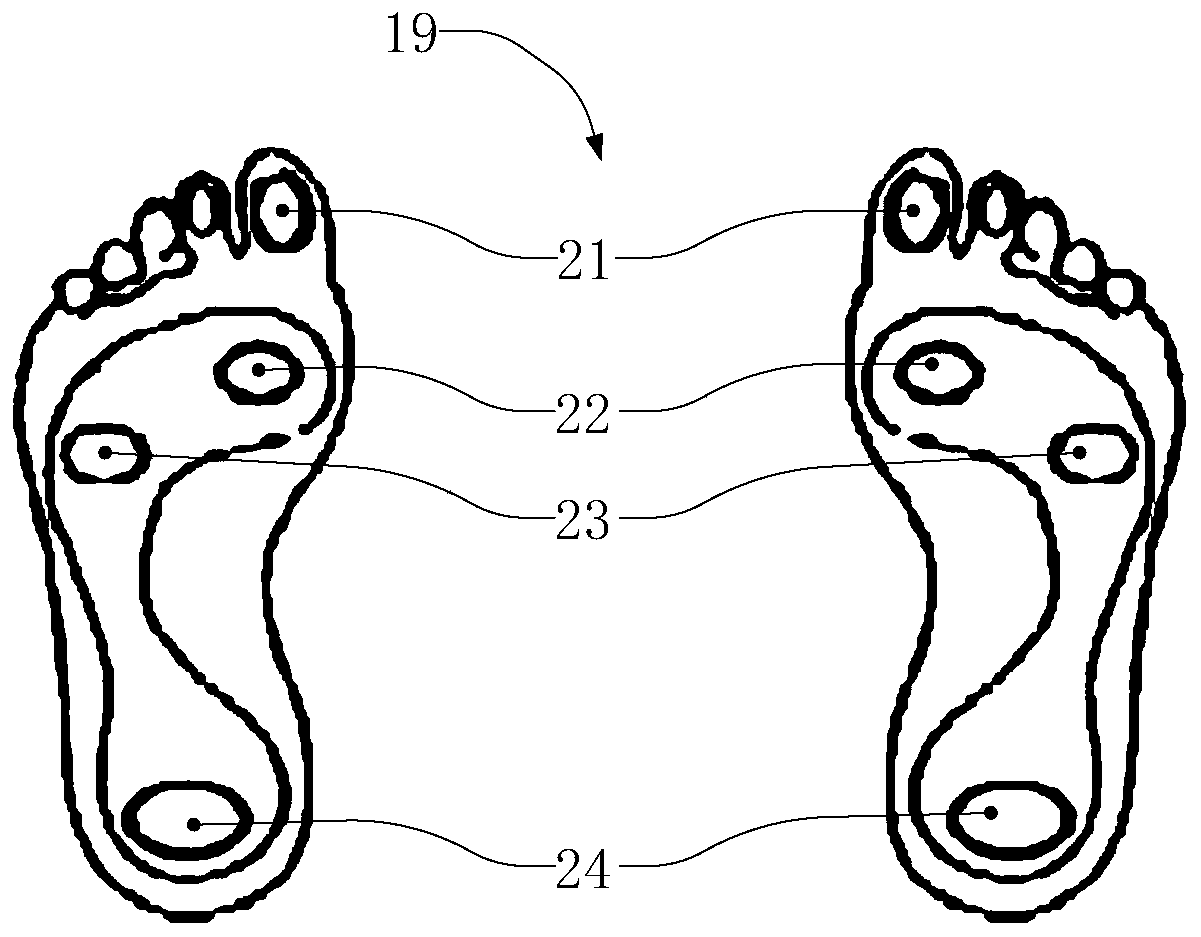
[0030] Such as figure 1 and figure 2 As shown...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More