

Lower limb rehabilitation external skeleton system and drive-driven adjustable joint thereof
A technology of exoskeleton and joints, which is applied in the direction of devices to help people walk, medical science, diagnosis, etc. It can solve problems such as movement disorders, weakness, and single-joint movement obstacles, so as to ensure walking stability and eliminate lateral overturning moments Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The present invention will be further described below in conjunction with embodiment and accompanying drawing.
[0042] In the following embodiments, taking the medical lower limb rehabilitation exoskeleton system whose degrees of freedom of hip joints, knee joints and ankle joints can be adjusted and whose passive degrees of freedom can automatically return to the center as an example, the lower limb rehabilitation exoskeleton system of the present invention and its master-slave The structure of the adjustable joint is exemplified.
[0043] Embodiment of lower limb rehabilitation exoskeleton system
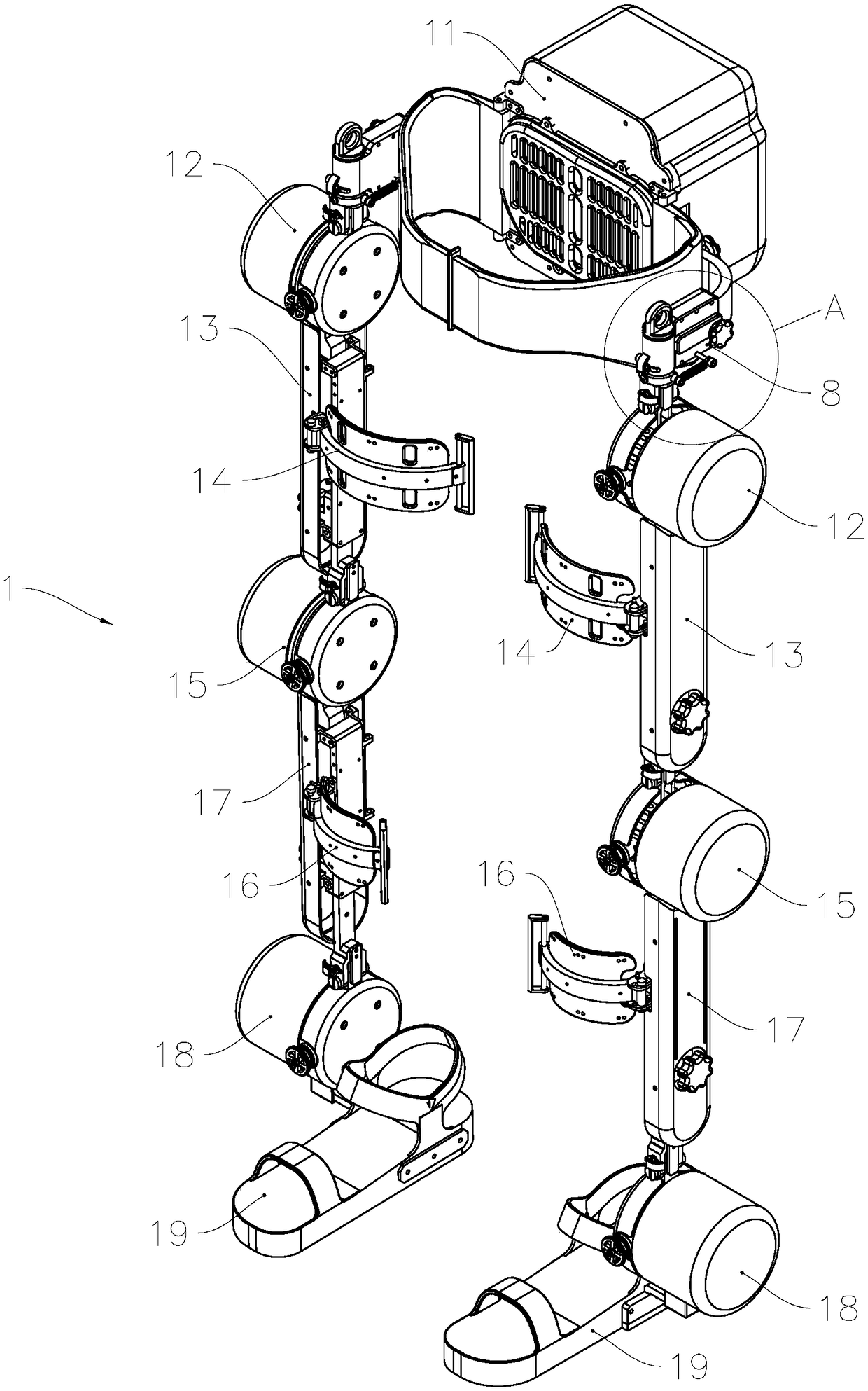
[0044] see figure 1 , The lower limb rehabilitation exoskeleton system 1 of the present invention includes a control unit, a detection unit and an exoskeleton 1 . The control unit includes a processor and a memory, the detection unit outputs detection signals to the control unit, and the control unit outputs control signals to the driving mechanisms of the exoskeleton to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More