

Four-foot walking robot through rigidly transmitting driving power by internal-combustion engine
A walking robot and driving force technology, applied in the direction of motor vehicles, transportation and packaging, etc., can solve the problems of inability to work continuously for a long time, inconvenient energy supply, and low energy utilization rate, so as to facilitate energy supply, reduce working frequency, The effect of reducing gravity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention is further described with reference to the accompanying drawings.
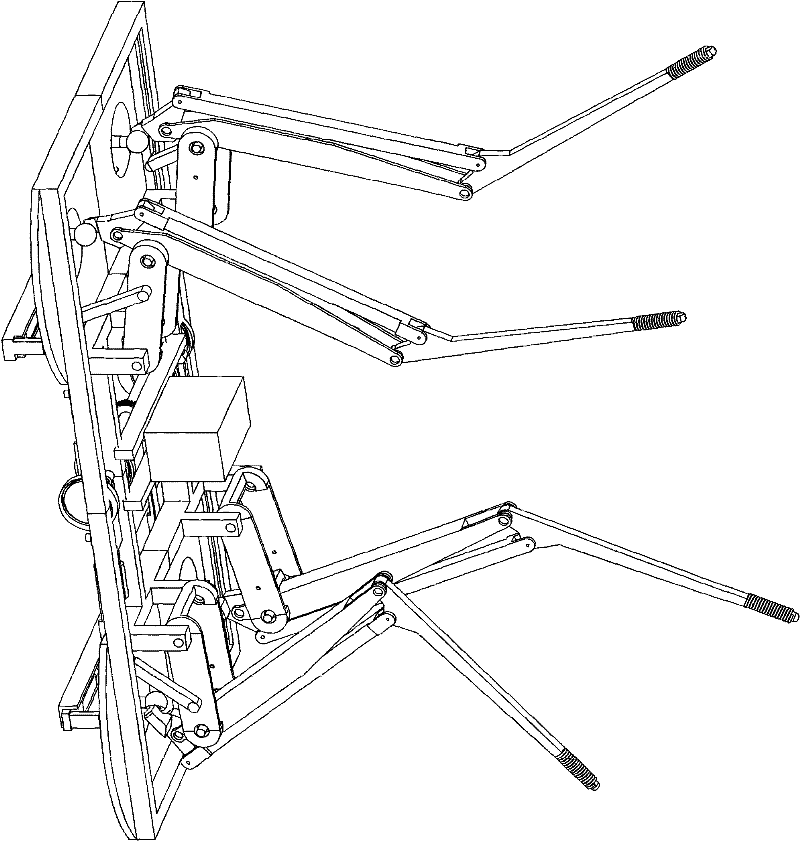
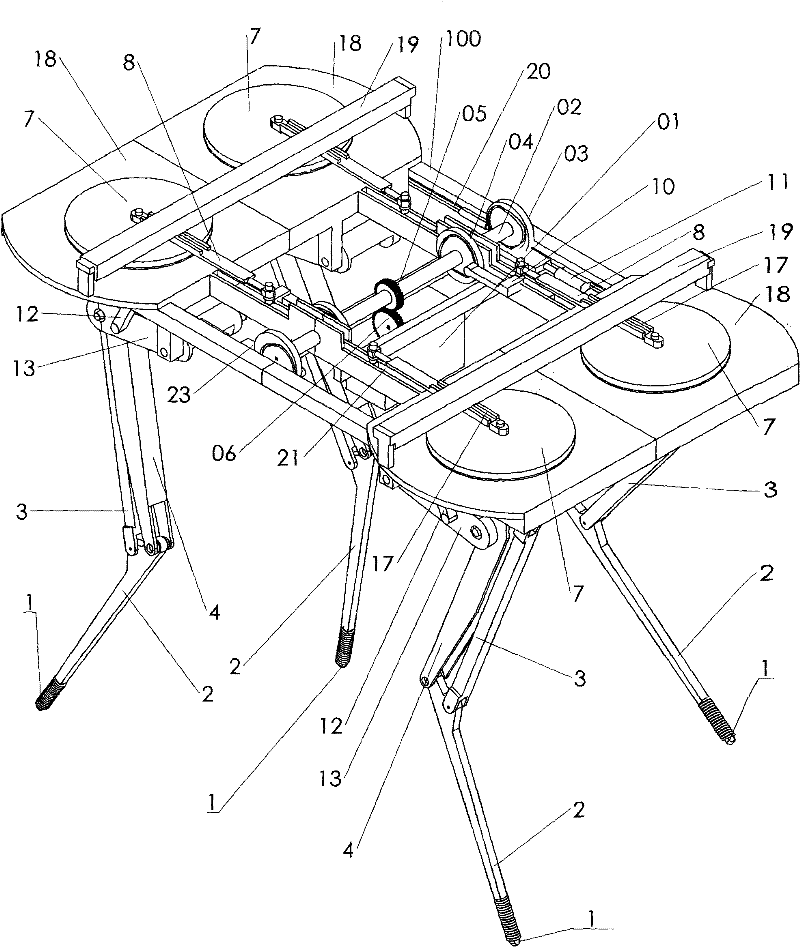
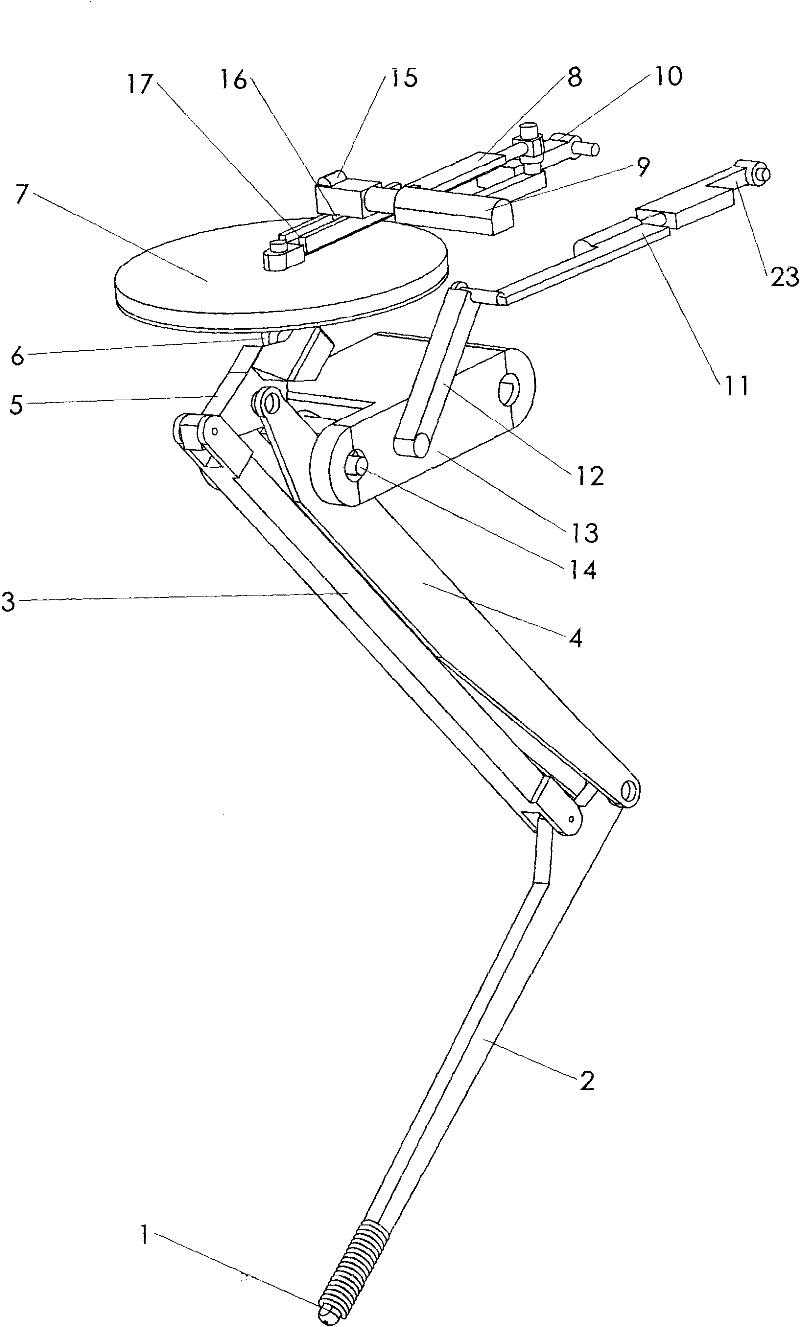
[0029] figure 1 , figure 2 , image 3 , Figure 4, a quadruped walking robot (hereinafter referred to as a robot) that can transmit driving force rigidly by an internal combustion engine as shown in the figure includes a square frame frame 100, and four leg units are arranged on the four corners of the frame frame frame 100, Each leg unit is connected with the frame frame 100 through an up-and-down movement mechanism and a horizontal motion mechanism on the top of the leg mechanism, and the fuel power system designed on the frame frame 100 is connected with each leg unit through a compound drive mechanism. The horizontal motion mechanism and the vertical direction motion mechanism are respectively connected.
[0030] The fuel power system on the frame frame 100 is composed of the internal combustion engine 01 outputting driving force through the continuously variable transmiss...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More