Exoskeleton robot system and kinematics extremity detection-based control method
A technology of exoskeleton robot and driving system, which can be applied in the direction of equipment to help people walk, physical therapy, etc. It can solve the problems of poor human-computer interaction performance, no effective control method, and difficulty in achieving control effects. The effect of reducing the bearing capacity and reducing the gravity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
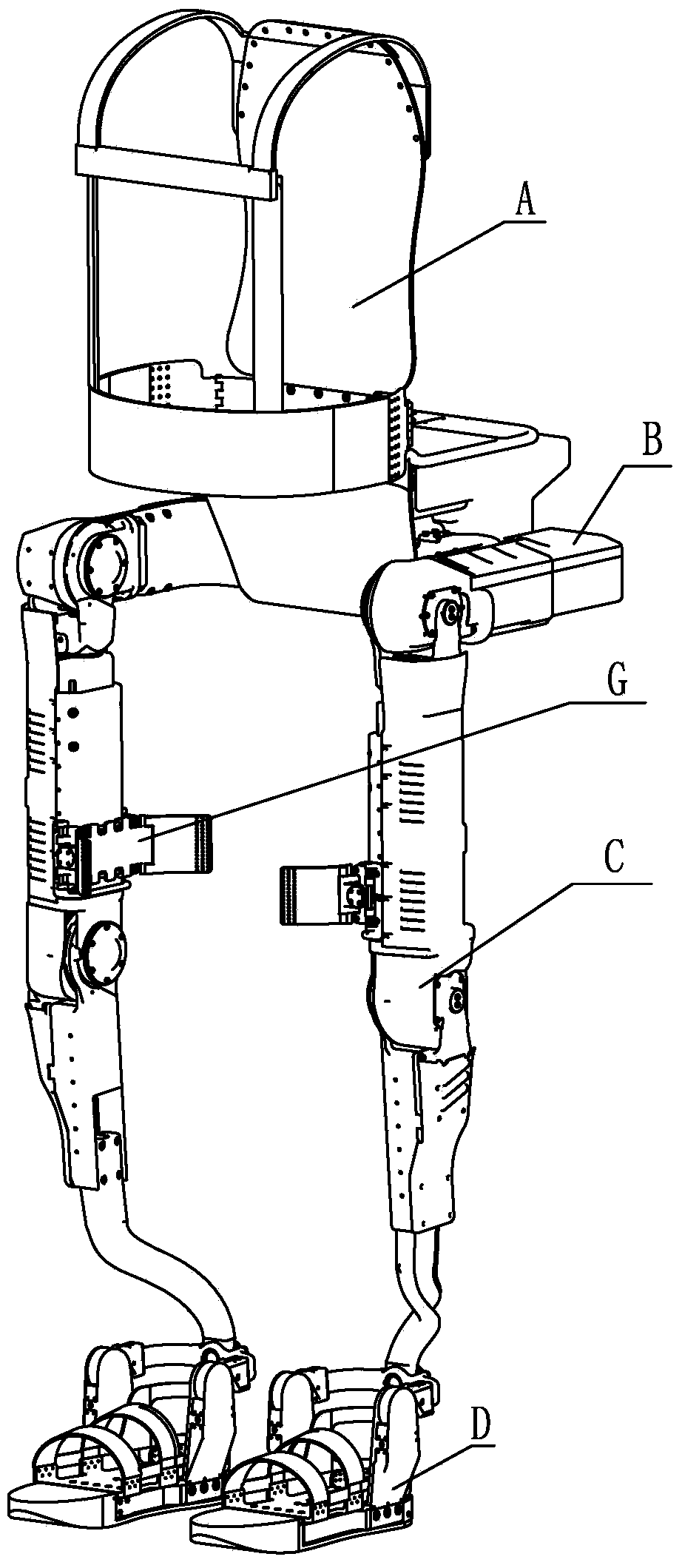
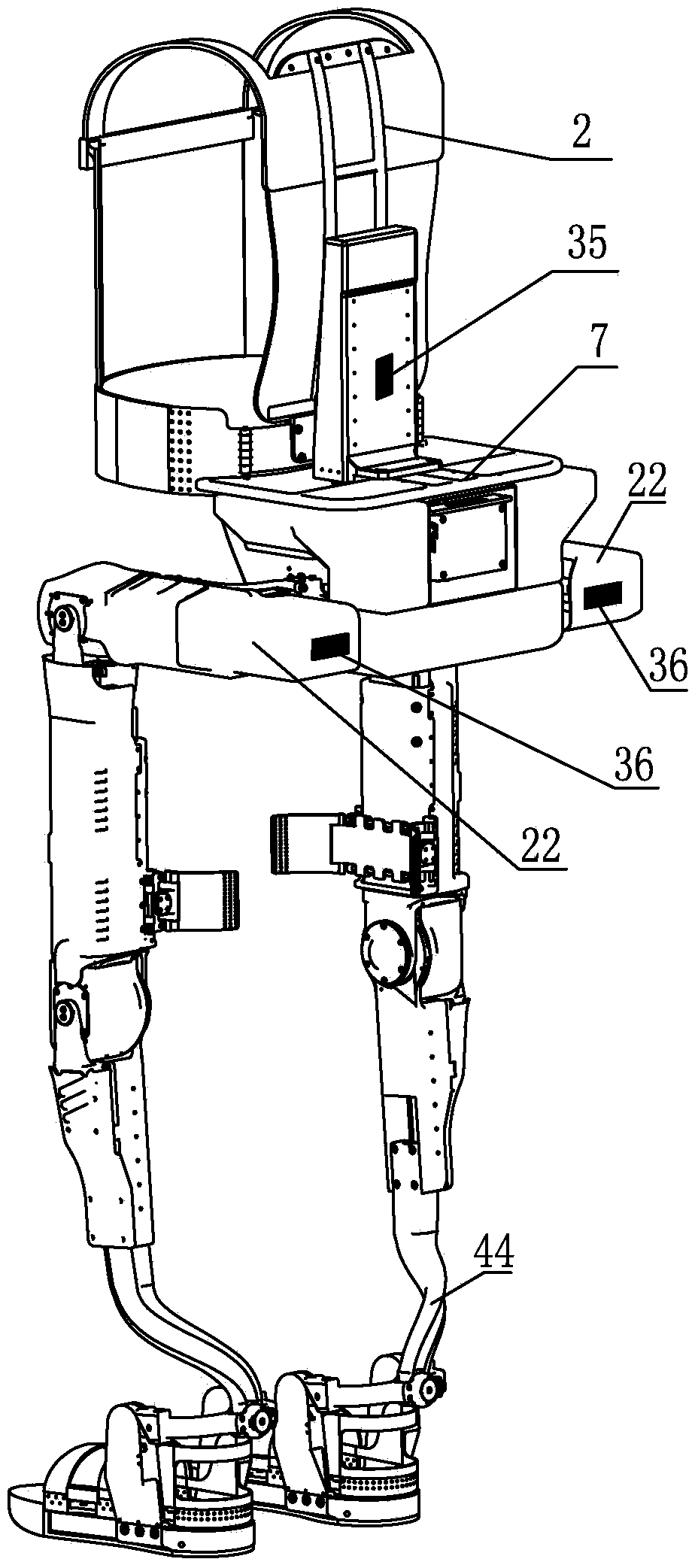
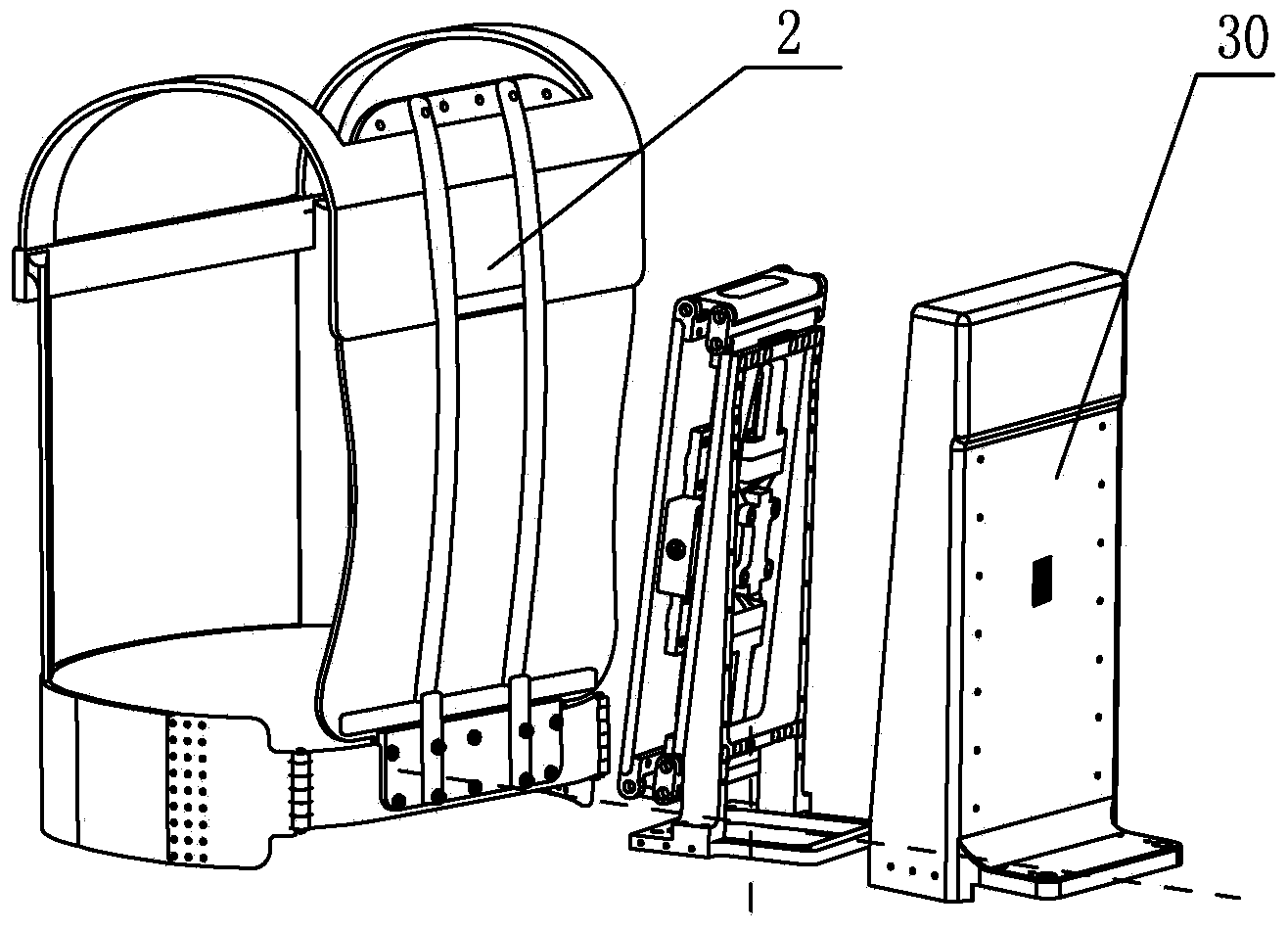
[0038] Specific implementation mode one: combine Figure 1-Figure 7 and Figure 11 Explain that an exoskeleton robot system in this embodiment includes an upper body back A, a left leg and a right leg, and the left leg and the right leg respectively include a hip driving system B, a knee driving system C, a foot wearing system D and Binding device G; the back of the upper body A includes a human body back support 2 and a load mounting plate 7, the human body back support 2 is installed on the load mounting plate 7, the hip driving system B includes a shell 22, and the knee driving system C includes a calf Connecting plate 44, foot wearing system D comprises U-shaped connecting plate 51, foot rubber sole 58 and two vertical lugs 55-2, the middle part of U-shaped connecting plate 51 is hinged with the lower end of shank connecting plate 44, U-shaped The two ends of the connecting plate 51 are respectively rotatably connected with the two vertical lugs 55-2;
[0039] It also in...
specific Embodiment approach 2
[0051] Specific implementation mode two: combination Figure 6 Explain that one end of the first cantilever beam 19 in this embodiment is processed with a spherical portion, one end of the second cantilever beam 20 is processed with a spherical portion, and the spherical portion of the first cantilever beam 19 is inserted into one of the grooved support plates 10 In the opening of the second cantilever beam 20 , the spherical portion is inserted into the opening of the remaining one trough-shaped support plate 10 . In this way, in the force information transmission of the cantilever beam, a spherical force transmission configuration structure is designed, which reduces the friction loss and improves the detection sensitivity. Others are the same as in the first embodiment.
specific Embodiment approach 3
[0052] Specific implementation mode three: combination Figure 7 Note that each of the strain gauges 25 in this embodiment is a foil resistance strain gauge or a strain gauge sensor. Such a setting, such a setting, has a wide measurement range, good product stability, high sensitivity, and can measure a variety of mechanical signals. Others are the same as in the first or second embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More