

A robot teaching method, device, equipment and medium
A teaching method and robot technology, applied in the field of robotics, can solve problems such as poor flexibility, time-consuming and labor-intensive
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
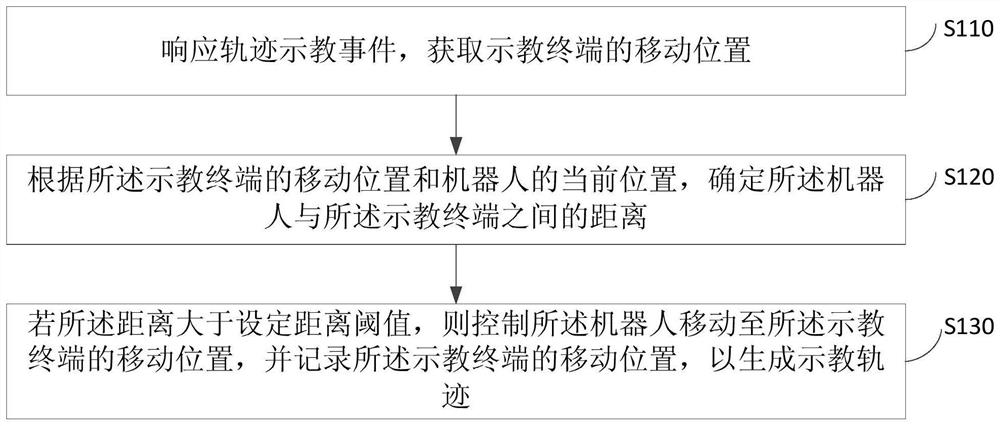
[0030] figure 1 It is a flow chart of a robot teaching method provided by Embodiment 1 of the present invention. This embodiment is applicable to the situation of teaching the trajectory of the robot. The method can be executed by a robot teaching device, and the device can be realized by software and / or hardware. Typically, the device can be a server. see figure 1 , a robot teaching method provided in this embodiment includes:
[0031] S110. Responding to the trajectory teaching event, acquire the moving position of the teaching terminal.
[0032] Among them, the trajectory teaching event can be triggered by selecting the teaching mode of the robot. The teaching terminal moves under the carrying of the teaching personnel. The moving position is the position coordinate passed by the teaching terminal during the moving process, and the moving position can be determined through the positioning system associated with the teaching terminal. The positioning system may be a gl...
Embodiment 2
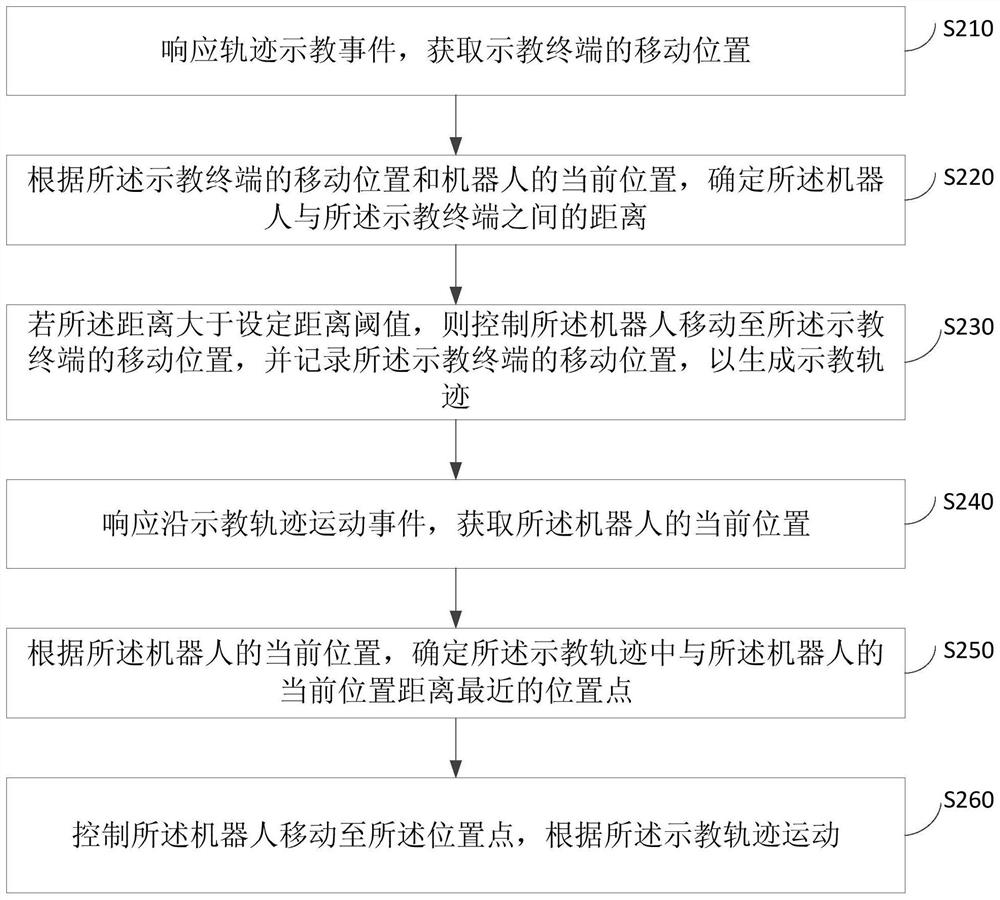
[0050] figure 2 It is a flow chart of a robot teaching method provided by Embodiment 2 of the present invention. In practical applications, the robot is often required to perform tasks along the specified teaching trajectory. However, the initial position of the robot is usually not on the specified teaching trajectory, so the robot needs to be moved to the specified teaching trajectory. For this reason, the solution of this embodiment is proposed on the basis of the above embodiments. General figure 2 , a robot teaching method provided in this embodiment includes:
[0051] S210. Respond to the trajectory teaching event, and obtain the moving position of the teaching terminal.
[0052]S220. Determine the distance between the robot and the teaching terminal according to the moving position of the teaching terminal and the current position of the robot.
[0053] S230. If the distance is greater than the set distance threshold, control the robot to move to the moving posit...
Embodiment 3
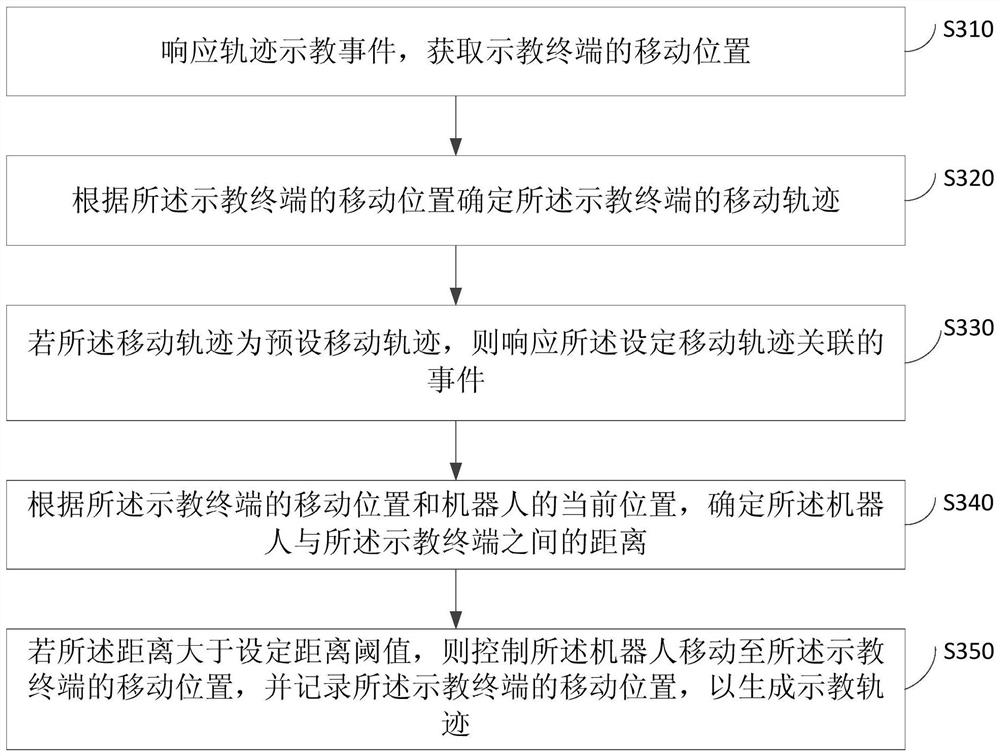
[0066] image 3 It is a flow chart of a robot teaching method provided by Embodiment 3 of the present invention. In the actual teaching process, the teaching personnel may have to deal with some things, such as answering the phone or approaching to check the running status of the robot. At this time, it is necessary to suspend the teaching of the robot. For this reason, the solution of this embodiment is proposed on the basis of the above embodiments. General image 3 , a robot teaching method provided in this embodiment includes:
[0067] S310. Obtain the moving position of the teaching terminal in response to the trajectory teaching event.
[0068] S320. Determine a moving track of the teaching terminal according to the moving position of the teaching terminal.
[0069] S330. If the movement track is a preset movement track, respond to an event associated with the set movement track.
[0070] Wherein, the preset moving trajectory can be set according to actual needs. T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More