

Robot teaching method, device and robot
A teaching method and technology of teaching device, applied in the field of robotics, can solve the problems of low operation flexibility, time-consuming and laborious work of 3D modeling import, etc., to achieve strong operability, avoid touching the equipment, and protect the damaged effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] A specific implementation of a teaching method and device for a robot and a robot provided in an embodiment of the present invention will be described in detail below with reference to the accompanying drawings. It should be noted that the described embodiments are only some of the embodiments of the present invention, but not all of the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
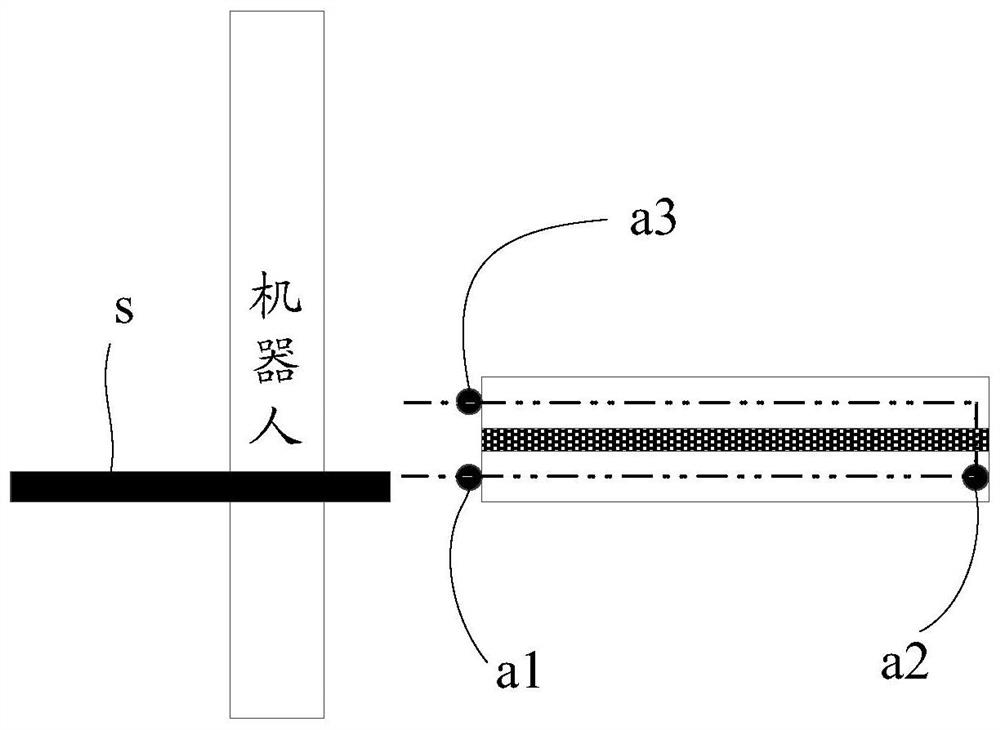
[0066] The inventor found in the research that the equipment located around the robot includes: single-layer glass equipment and multi-layer glass equipment; the single-layer glass equipment is mainly processing equipment. figure 1 As shown, three teaching points are generally required, which are a1, a2 and a3 respectively. Among them, a1 is the position before the manipulator of the robot takes the glass into or t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More