

Multi-robot coordinative exploring technology combining autonomy and coordination
A multi-robot and robot technology, applied in the field of intelligent robots, can solve problems such as unreasonable selection strategy of navigation target points, computational complexity of coordination algorithms, and high requirements for computing resources and hardware of robots.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] In order to make the objects and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
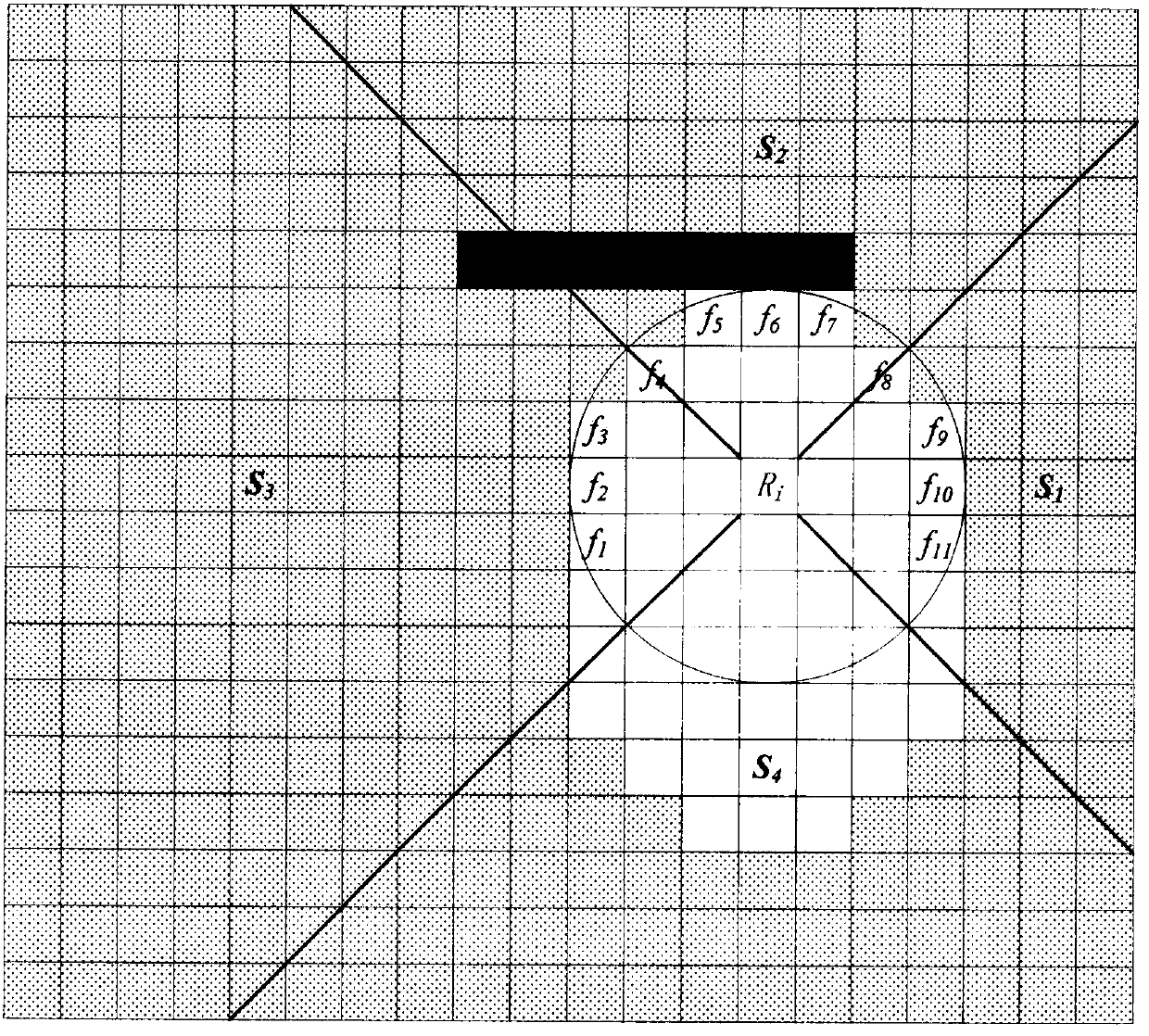
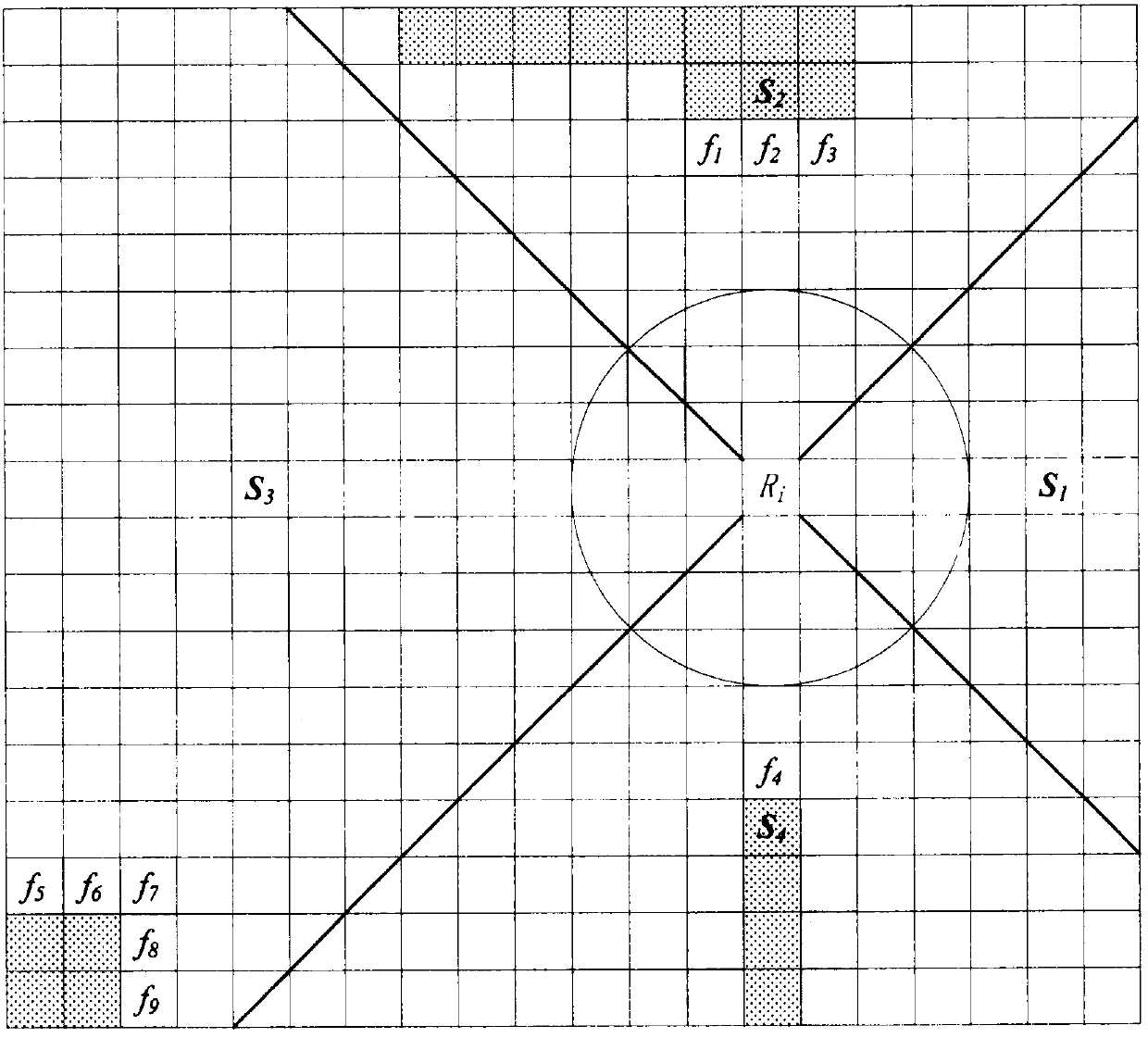
[0055] The specific implementation of the present invention provides a Multi-robot collaborative exploration technology combining autonomy and negotiation , characterized in that n heterogeneous mobile robots R 1 ,...,R n Multi-robot collaborative exploration is realized by combining the two working modes of autonomy and negotiation. Each robot creates a local occupancy grid map while exploring the environment; the technology includes the following steps:
[0056] S1. All robots select the direction of exploration sequentially according to the strength of their exploration ability, so that the robots can fully expand in the environment;
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More