

Method for establishing digital map for indoor service robot autonomous navigation
A service robot and autonomous navigation technology, which is applied in the field of digital map establishment for autonomous navigation of indoor service robots, can solve the problems of high robot requirements, expensive lidar, limited environmental features, etc., and achieves low hardware requirements, small data volume, and cost reduction. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
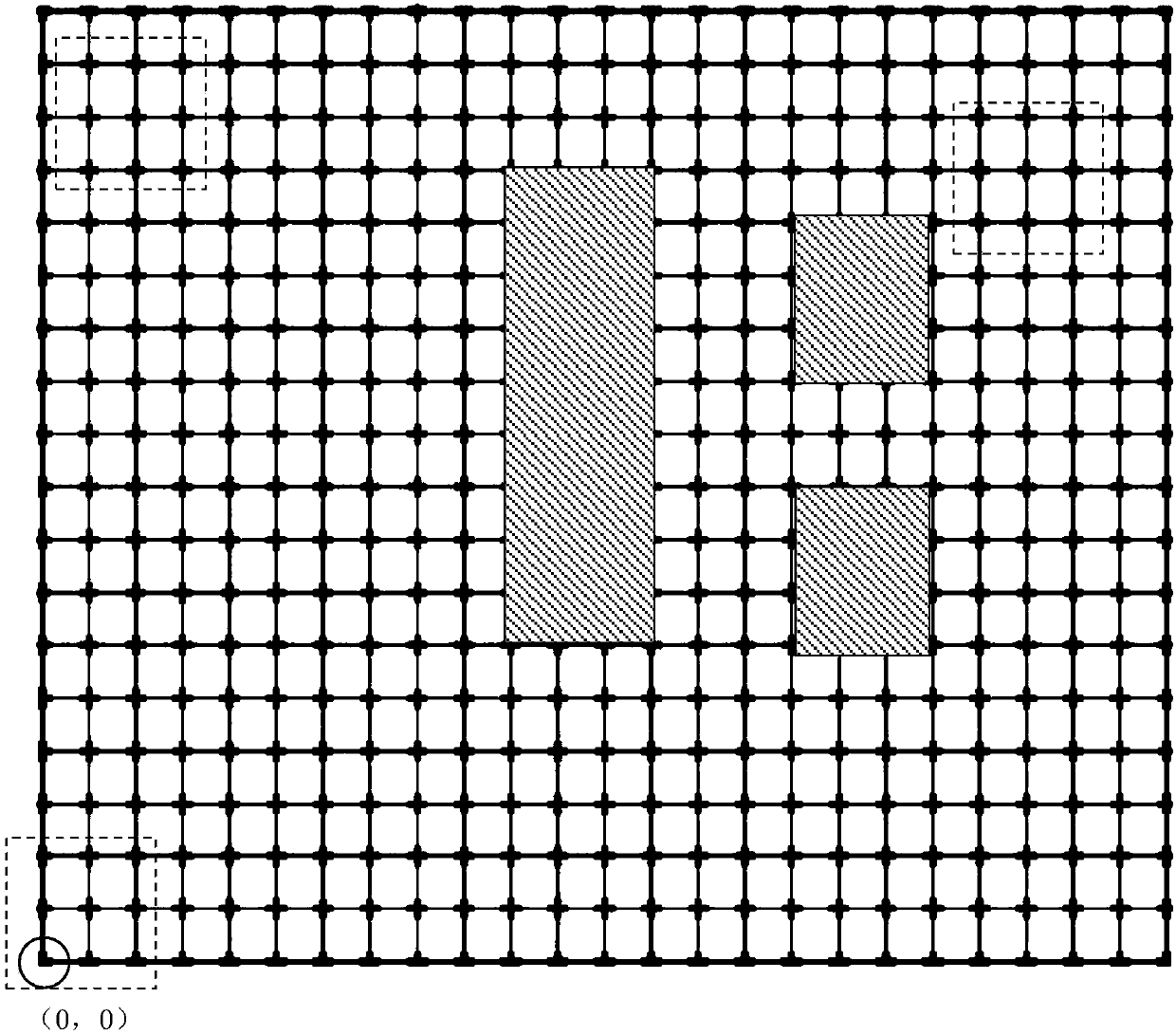
[0009] Such as figure 1 As shown, the method for establishing a digital map for autonomous navigation of an indoor service robot of the present invention includes a step of measuring indoor environmental characteristic data, and a step of inputting the above data into the built-in memory of the robot, wherein in the measurement room In the step of environmental feature data, the feature data of the indoor environment are manually measured, and the feature data of the indoor environment include indoor length, width, and the position of fixed obstacles, and then the indoor plane is divided into grids, and each grid is used as A map calculation point, according to the measured data and a preset map resolution to compile a two-dimensional array MAP[m][n] of the map, where MAP is the name of the array, m represents the row, n represents the column, any one The map calculation points described above are all elements in the array MAP, and the elements include four types: passable, im...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Length | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More