

Assembling robot
A technology of robots and steering gears, applied in the field of robots, can solve problems such as inflexible transformation of structural forms
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] In order to illustrate the present invention more clearly, the present invention will be further described below in conjunction with preferred embodiments and accompanying drawings. Similar parts in the figures are denoted by the same reference numerals. Those skilled in the art should understand that the content specifically described below is illustrative rather than restrictive, and should not limit the protection scope of the present invention.
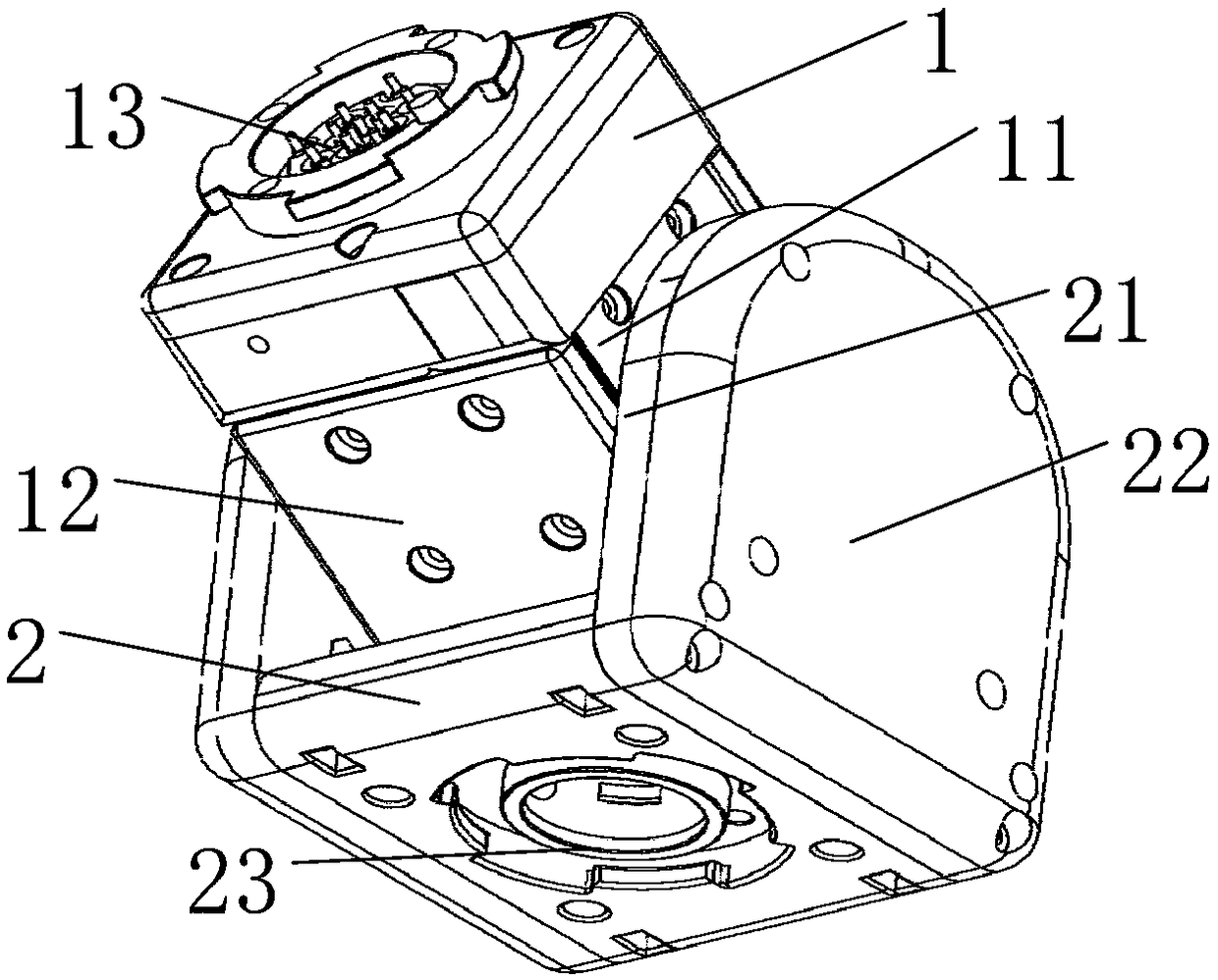
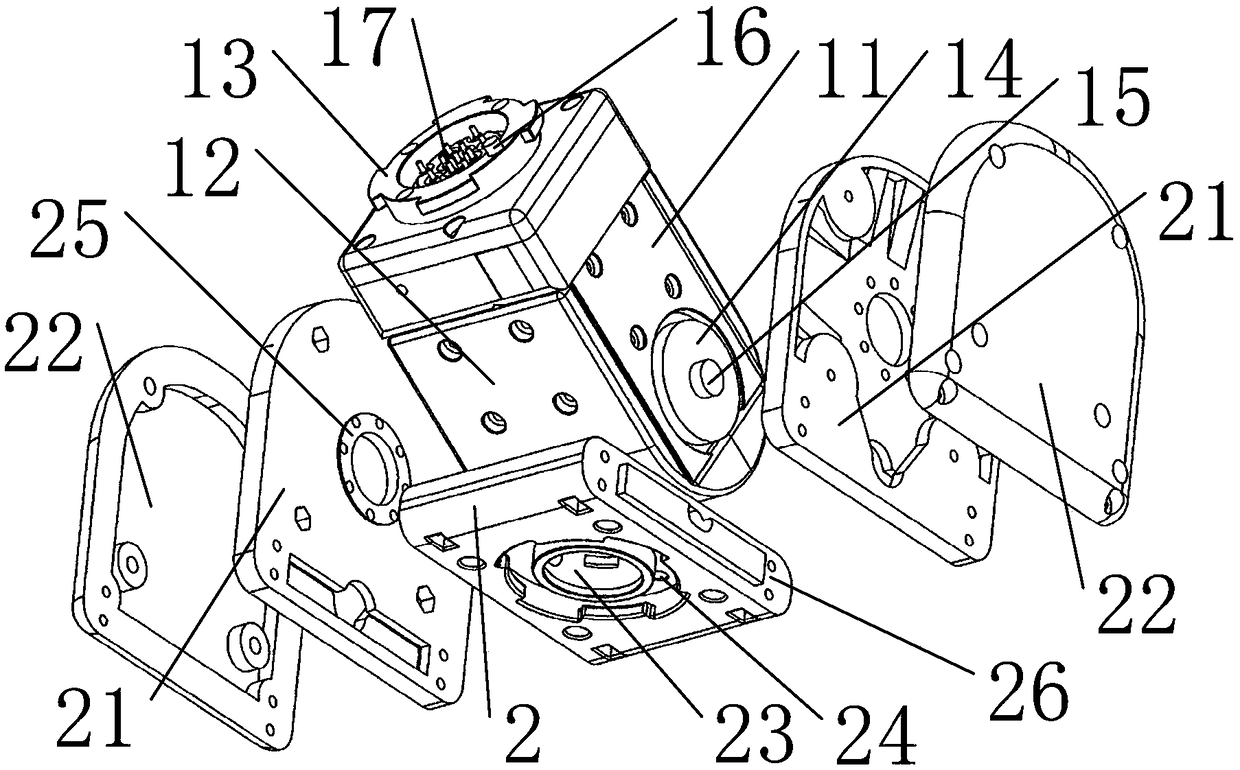
[0030] Such as figure 1 with figure 2 As shown, an assembleable robot disclosed in the present invention includes: at least one joint device, the joint device includes a base 2 and a docking unit 1, and the docking unit 1 is provided with a steering gear 14, and the servo steering gear 14 integrates Motors, reducers, encoders and other components support bus command control. The steering gear shaft 15 is connected to the side wall 26 of the base 2, the docking unit 1 can rotate around the steering gear shaft 15 on the b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More