

Path planning method for continuous monitoring of large-scale environments by multiple unmanned aerial vehicles
A technology for unmanned aerial vehicles and path planning, applied in the field of environmental information collection, to achieve the effect of reducing calculation pressure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The present invention provides a continuous monitoring path planning method for large-scale environments with multiple unmanned aerial vehicles, including sensor models, sub-area path optimization, overall monitoring process planning, simulation and description of experimental results.
[0048] First, the sensor model
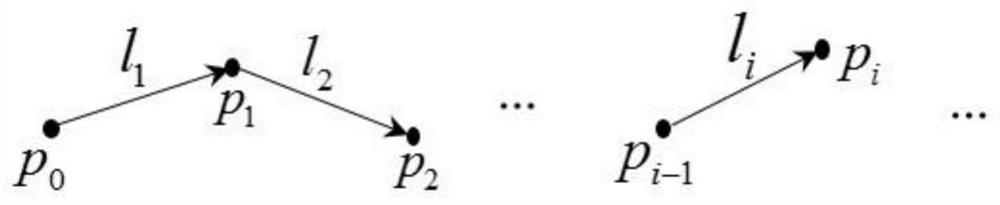
[0049] In order to better describe the coverage effect of the sensor on its surrounding environment, and quantitatively reflect the accuracy and reliability of the information collected by the sensor, the present invention first establishes a relatively universal sensor model. The information collection quality of a sensor to a point in its surrounding environment is related to the relative position of the point and the sensor. In order to better describe their relationship, the present invention establishes an innovative sensor model, which describes when the sensor moves along a The reliability of the information collection of any point q in the enviro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More