Method for creating adaptive grid map of robot based on novenary tree
A grid map and robot technology, applied in the direction of navigation computing tools, etc., can solve the problems of data explosion and occupying a large amount of storage space, and achieve the effect of saving storage space and avoiding the expansion of search range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
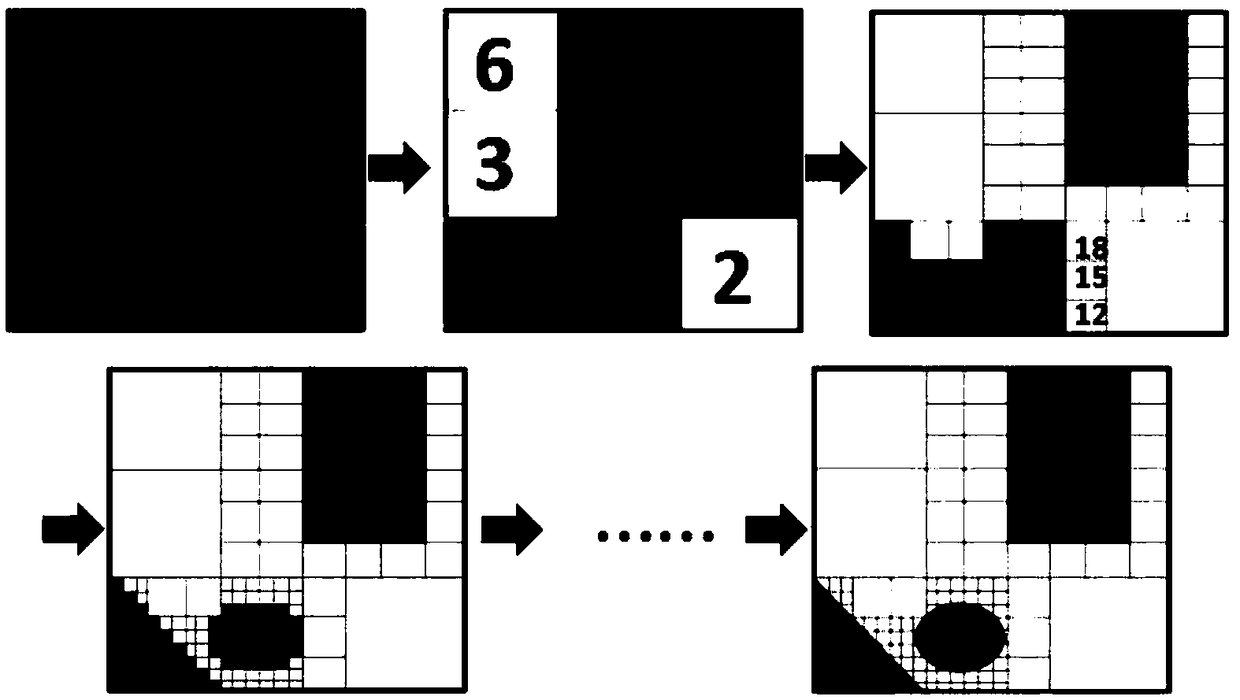
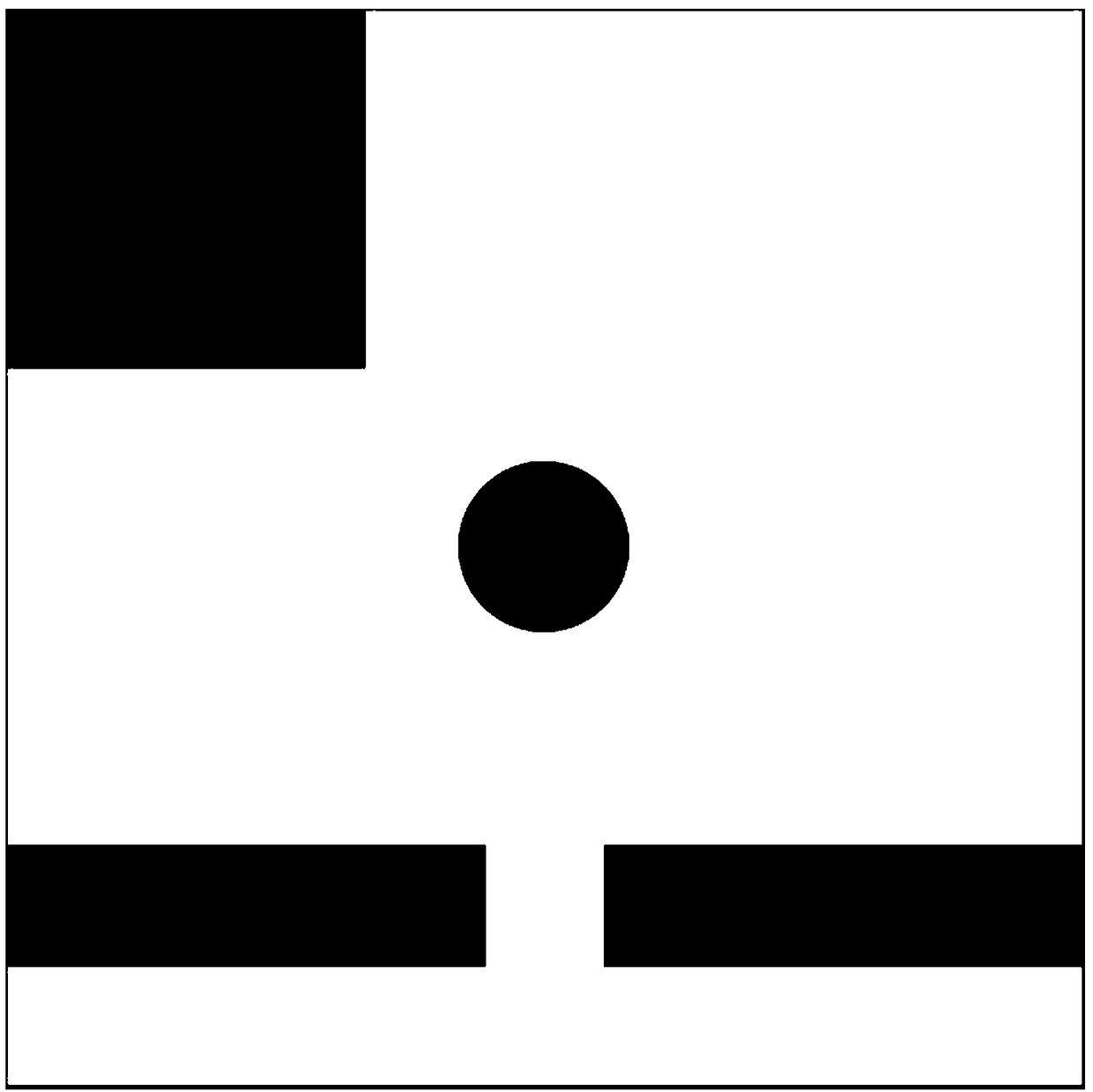
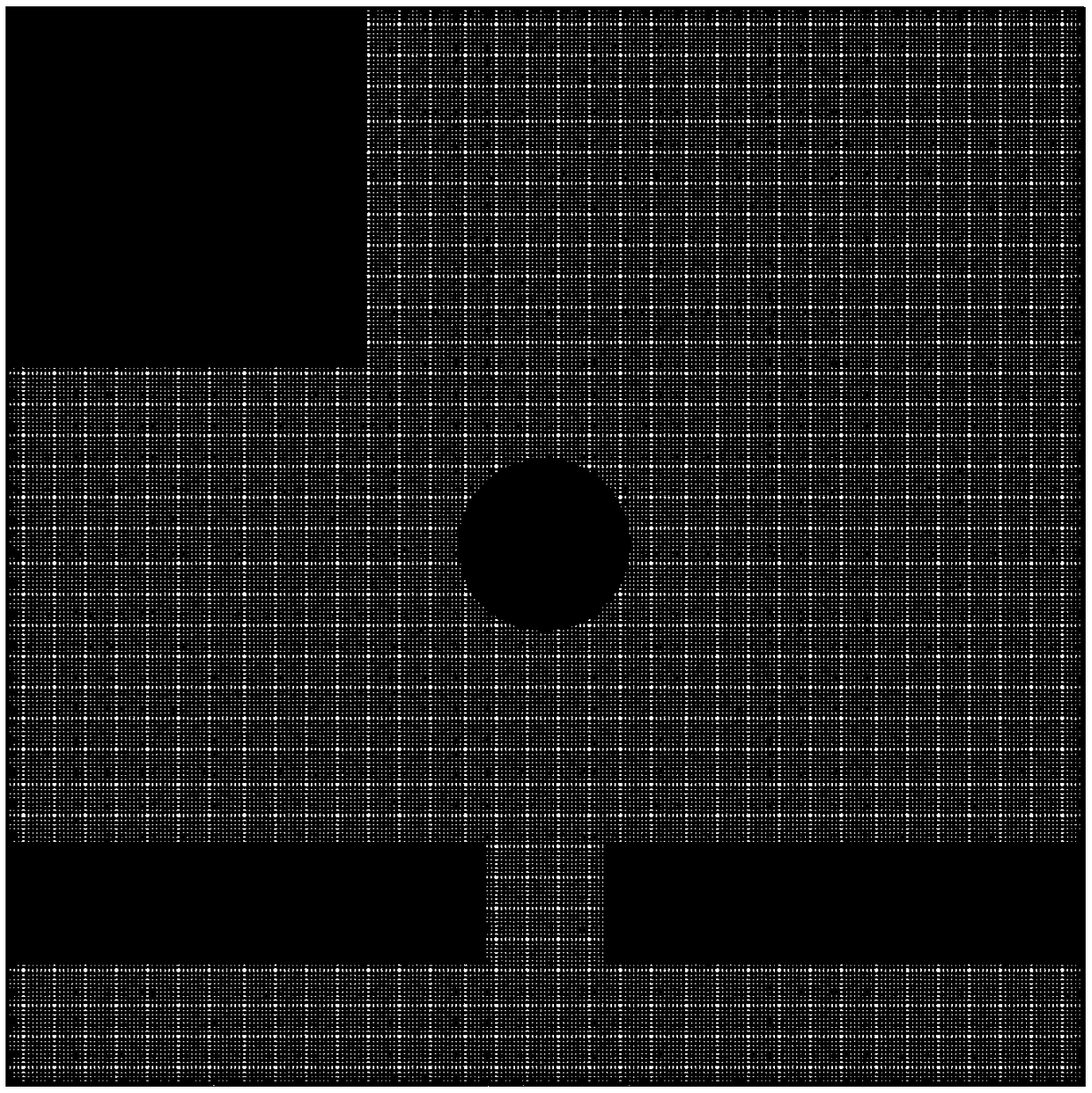
[0044] In the first step, the entire unknown environment that the robot needs to recognize is considered as a map with an unknown state. The robot circles around the entire unknown environment and divides the entire unknown environment into a nine-square grid structure, that is, the map is divided into uniform Nine subrasters. The calculation method of the center coordinates (x, y) of each sub-grid is as follows:
[0045]
[0046]
[0047] The length and width of the environmental map scale are denoted by a and b respectively, and the number of the grid obtained after n times of subdivision is X 1 x 2 x 3 ...X n (n bits), i is selected from 0,1,2,3,4,5,6,7,8. When X 1 ,X 2 ,X 3 ,...,X n When 0, 3, or 6 are taken, λ 1 ,λ 2 ,λ 3 ,...,λ n = -1; when x 1 ,X 2 ,X 3 ,...,X n When taking 1, 4, 7, λ 1 ,λ 2 ,λ 3 ,...,λ n = 0; when x 1 ,X 2 ,X 3 ,...,X n When taking 2, 5, 8, λ 1 ,λ 2 ,λ 3 ,...,λ n =1. When X 1 ,X 2 ,X 3 ,...,X n When taking 0, 1, 2...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com