Tripod self-propelled vehicle and its obstacle avoidance method
A self-propelled vehicle and tripod technology, which is applied in the direction of motor vehicles, vehicle components, and autonomous decision-making processes, etc., can solve the problems of no obstacle avoidance function, the tripod warning sign cannot move smoothly, etc., and the solution is low-cost, The effect of high detection accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
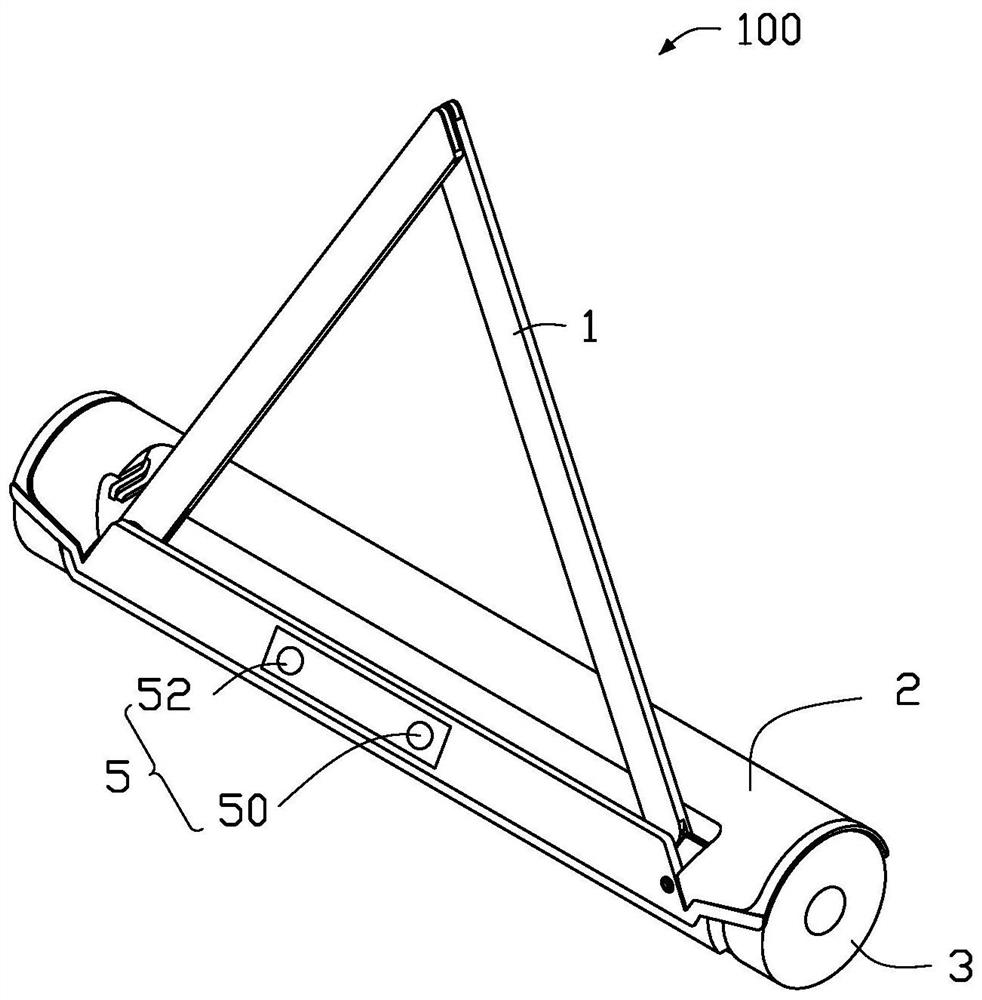
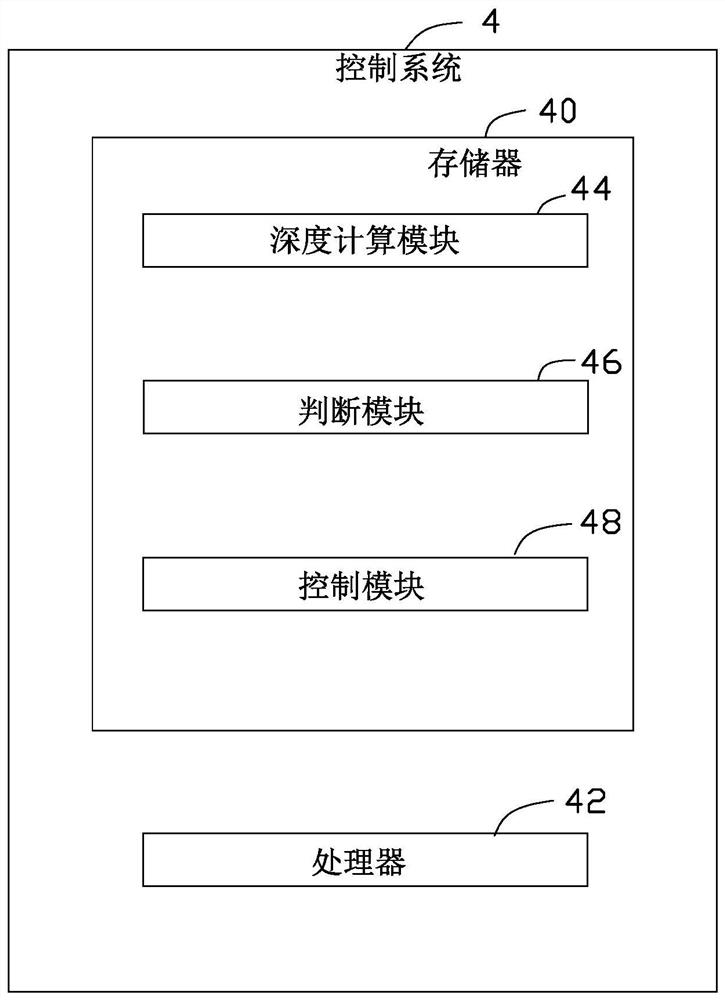
[0016] see Figure 1-2 , in one embodiment, a tripod self-propelled vehicle 100 includes a warning sign 1 , a base 2 , wheels 3 installed on both sides of the base 2 , a control system 4 and a binocular camera 5 . The tripod self-propelled vehicle 100 can be used to place behind a predetermined distance (eg, 100 meters, 150 meters) from the vehicle when the vehicle (not shown) breaks down. The control system 4 runs in the tripod self-propelled vehicle 100 and controls the movement of the tripod self-propelled vehicle 100 . The control system 4 includes a memory 40 , a processor 42 and one or more modules, the one or more modules are stored in the memory 40 and executed by the processor 42 to complete the obstacle avoidance function provided by the present invention. The memory 40 can be used to store various data of the tripod self-propelled vehicle 100 , such as storing program codes of the control system 4 . The binocular camera 5 can be fixedly installed on the warning si...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More