

Propelling device for underwater robot and underwater robot
A technology of an underwater robot and a propulsion device, which is applied in the field of robots, can solve the problems of low working efficiency of the underwater robot, the underwater robot does not have the ability of multi-degree-of-freedom motion, and cannot realize the multi-degree-of-freedom motion, so as to achieve more freedom. degree of exercise
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
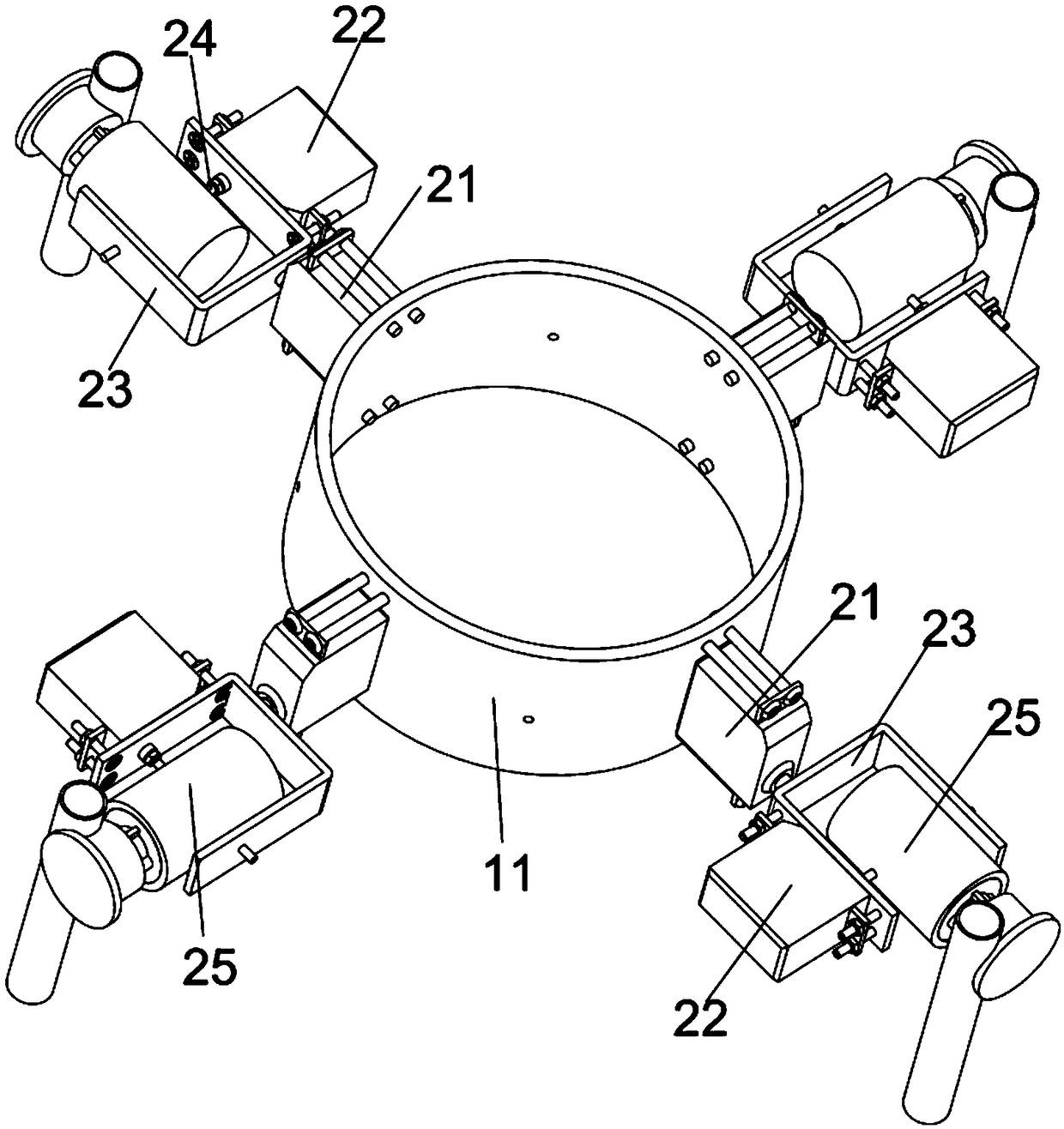
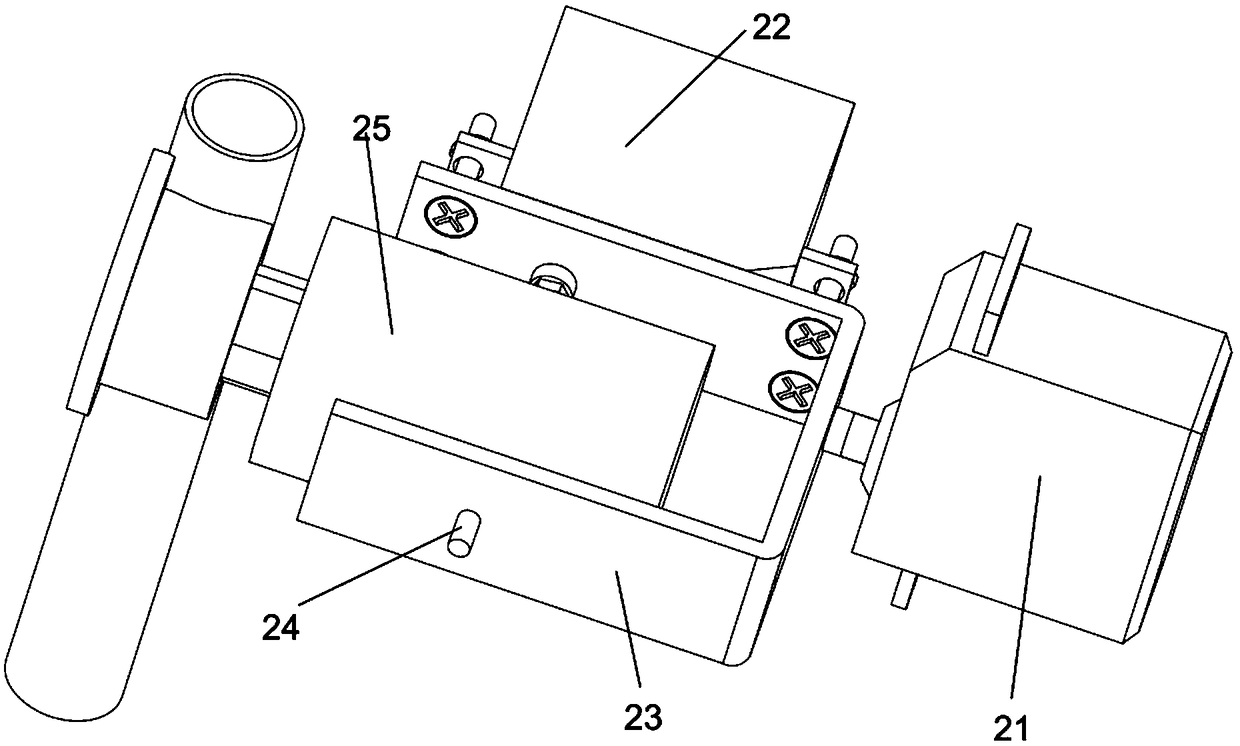
[0085] Specific implementation method: the underwater robot collects data information through sensors underwater, and sends the collected data information to the control component, which is processed and analyzed by the control component, and sends the final output command to the propulsion device, which is adjusted by the steering gear. The water jet propeller 25 sprays water, thereby changing the direction of the underwater robot; the underwater robot is driven through the synergy of the control system and the propulsion device, so that the underwater robot can complete more degrees of freedom monitoring and exploration, thereby improving the underwater robot. reliability and practicality.
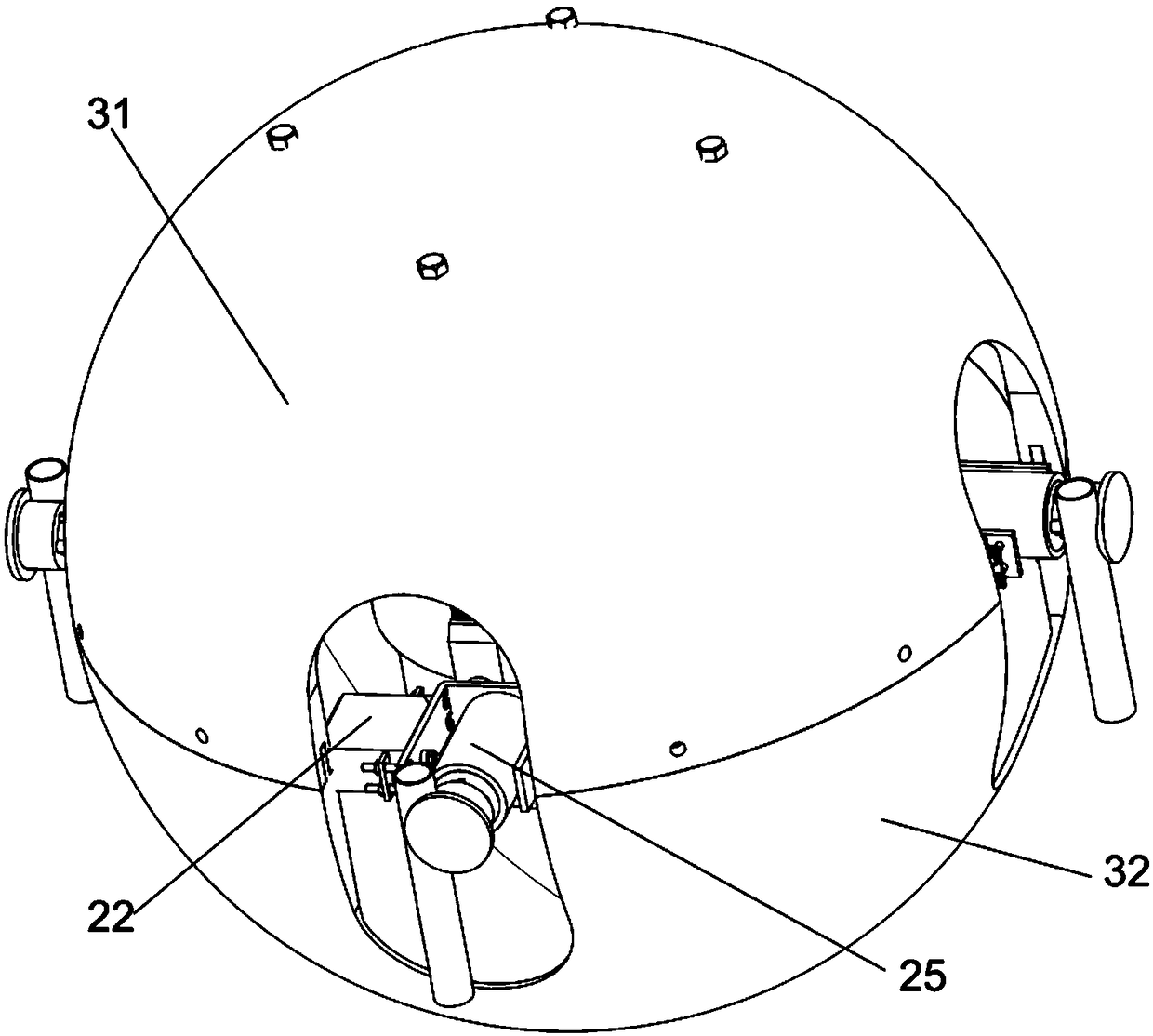
[0086] The second housing 32 is always perpendicular to the horizontal plane, when the underwater robot needs to move vertically to the horizontal direction, such as Figures 5 to 7 As shown, the first steering gear 21 and the second steering gear 22 jointly drive the water jet propeller...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More