

A straight line trajectory fast calculation method free of binocular synchronization
A fast calculation and straight line technology, applied in the field of stereo vision, can solve the problems of feature point matching and calculation difficulties, and achieve the effect of solving the difficulty of binocular synchronization in calculation trajectories
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be further described below in conjunction with accompanying drawing:
[0020] A fast calculation method for a straight line trajectory without binocular synchronization, comprising the following steps:
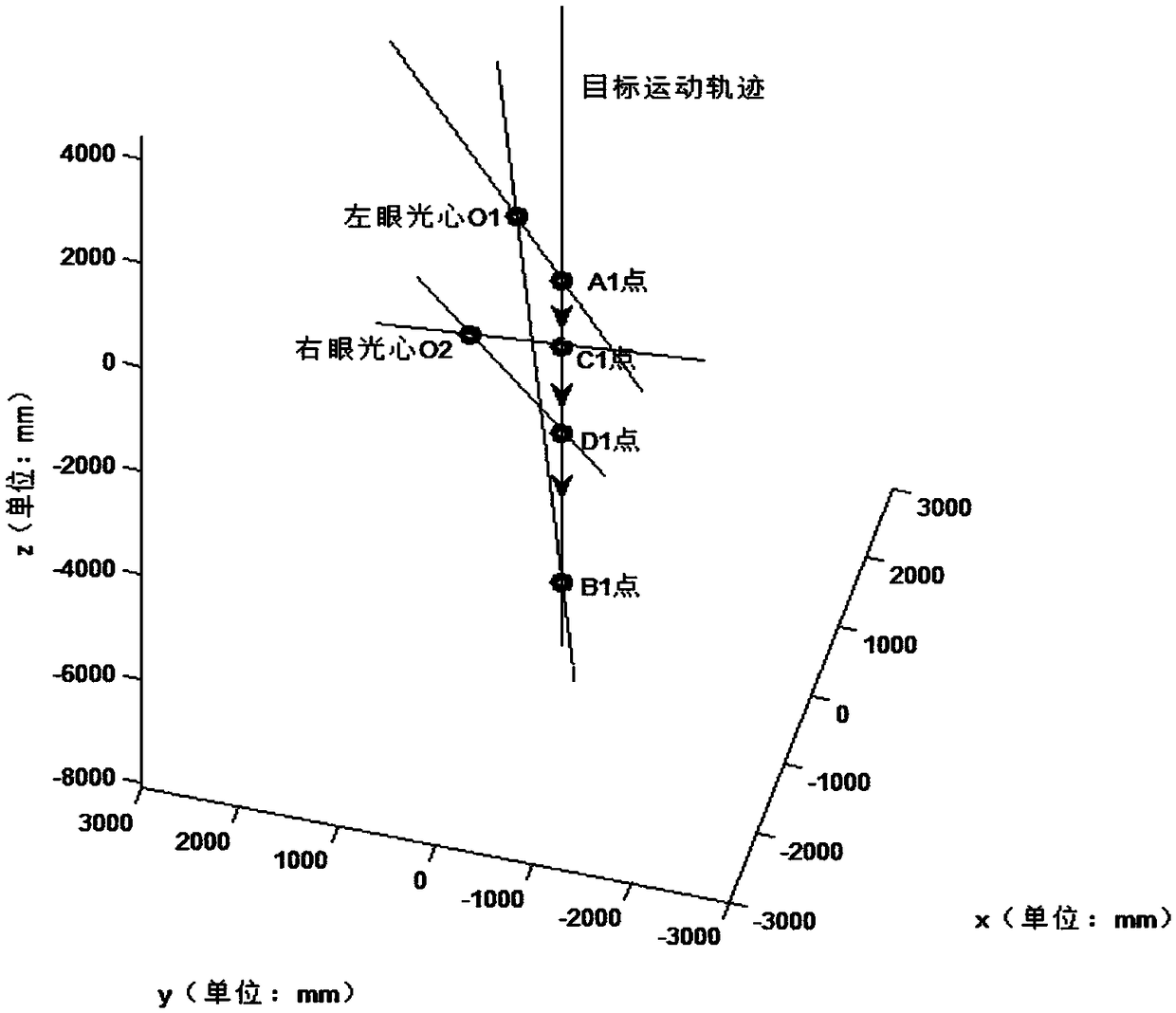
[0021] S1. The binocular camera shoots the target image moving in a straight line, establishes the image pixel coordinate system and obtains the pixel coordinates of the target point in the left-eye and right-eye images respectively;
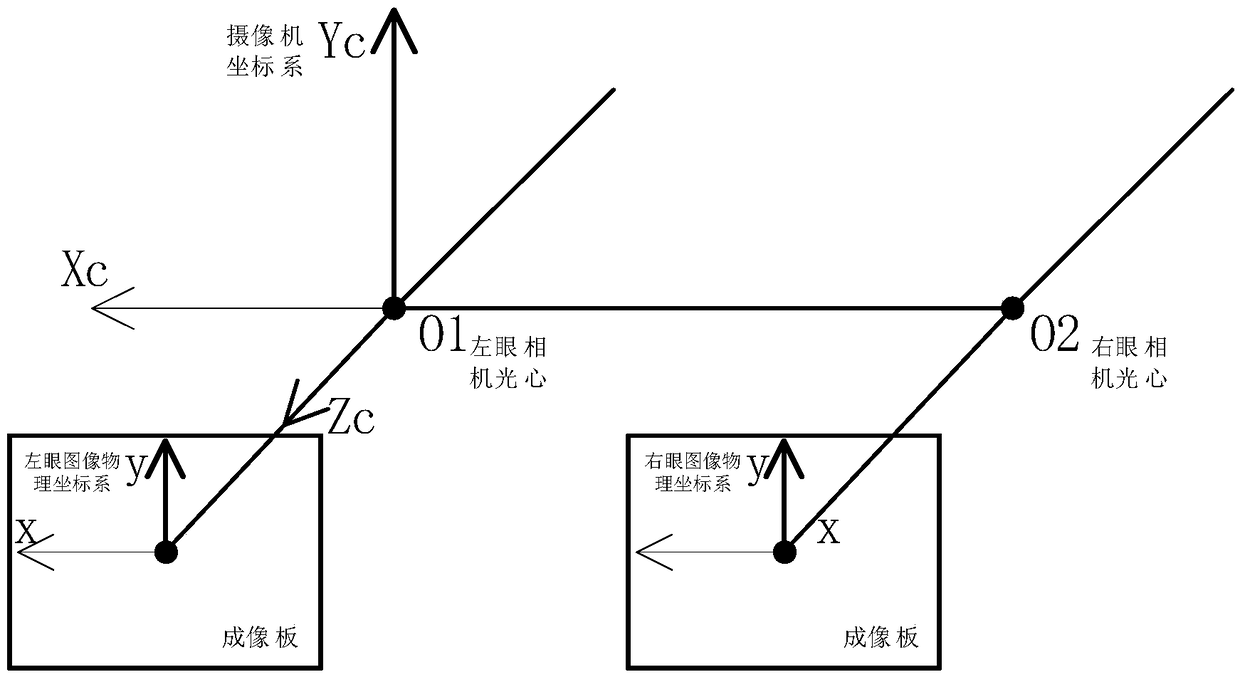
[0022] S2, using the optical center of the left eye camera in the binocular camera as the origin Oc to establish a space camera coordinate system, establish the Xc axis and the Yc axis according to the image physical coordinate system of the imaging plane, and establish the Zc axis according to the camera central axis;
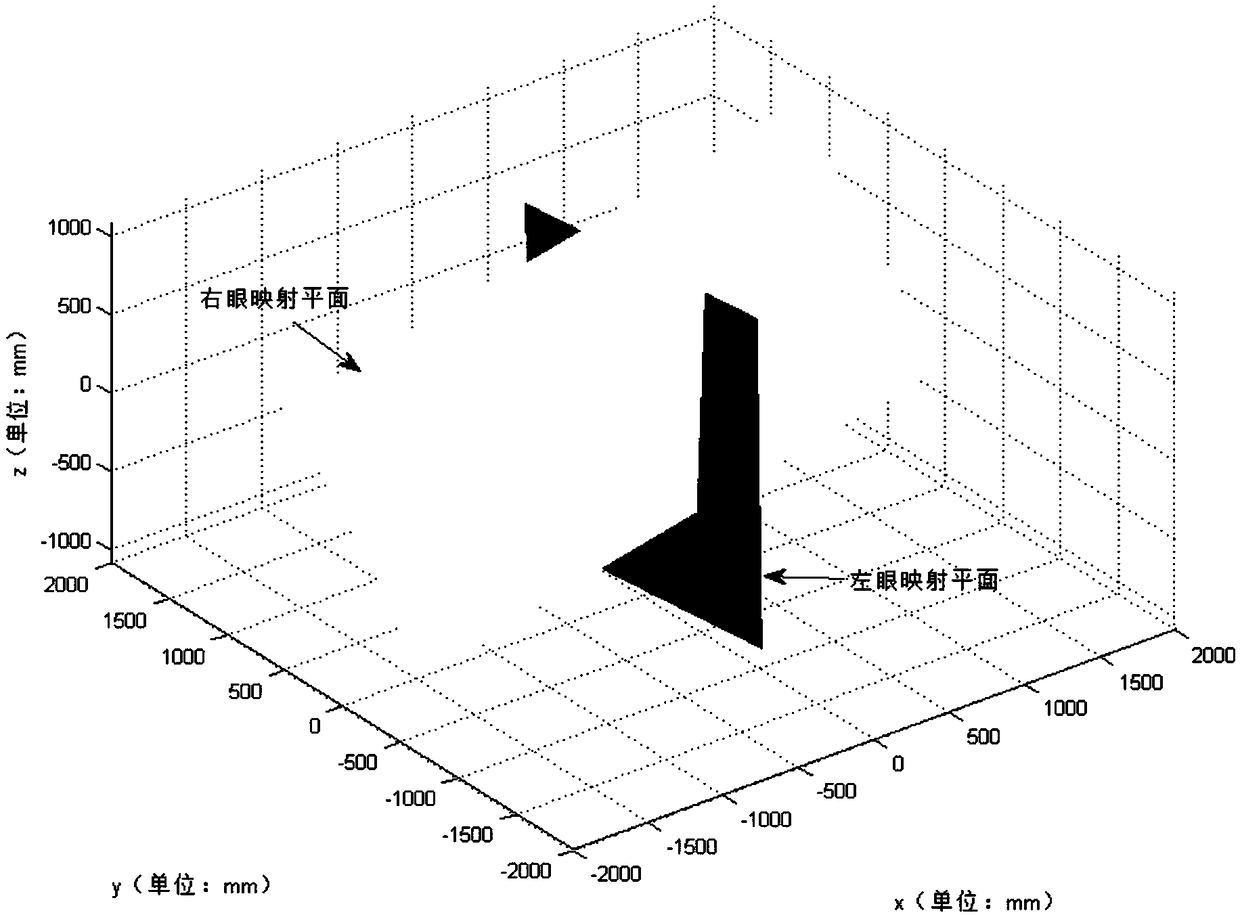
[0023] S3, using the imaging plane as the plane under the camera coordinate system in three-dimensional space, accordingly converting the two-dimensional point of the target in the image physica...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More