

Speech recognition-based iterative denoising device and cleaning robot
A technology for cleaning robots and speech recognition, applied in the field of robots, can solve the problems of incomplete noise reduction, mixed external noise, and low accuracy of speech recognition, and achieve the effect of thorough denoising and improving denoising efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0012] The technical solutions in the embodiments of the present invention will be described in detail below with reference to the drawings in the embodiments of the present invention.
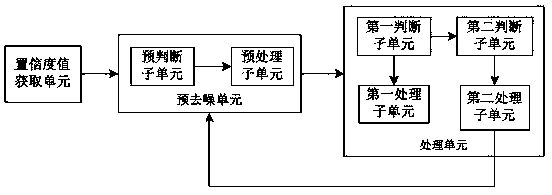
[0013] refer to figure 1 As shown, the embodiment of the present invention also provides an iterative denoising device based on speech recognition. The base of the iterative denoising device is provided with a microphone array with a fixed orientation. Some terms and explanations in this embodiment are the same as those in the above embodiment Same, no more details here.
[0014] The iterative denoising device includes a confidence value acquisition unit, a pre-denoising unit and a processing unit, the confidence value acquisition unit is used to determine the target voice signal from the voice signal acquired by the microphone array, and obtain the target confidence value accordingly The pre-denoising unit is used to receive the target confidence value obtained by the confidence value acquis...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More