

AGV navigation travel deviation correction method based on bp network
A travel deviation, BP network technology, applied in the field of AGV navigation, can solve the problems of increasing positioning error, inaccurate AGV positioning, affecting AGV work efficiency, etc., to achieve efficient navigation and eliminate the effect of driving path deviation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] A preferred embodiment of the present invention will be described below with reference to the accompanying drawings.
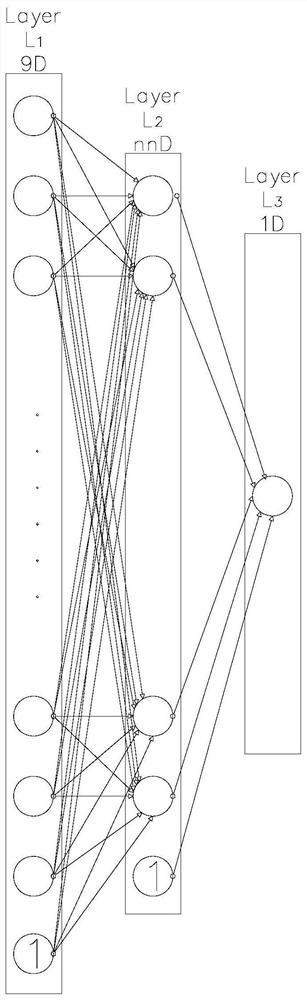
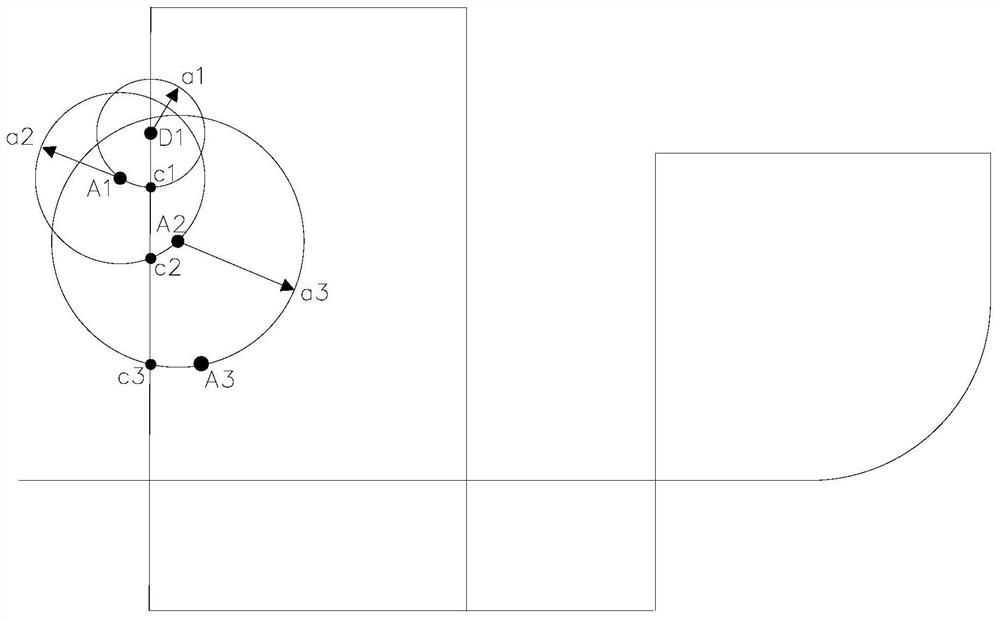
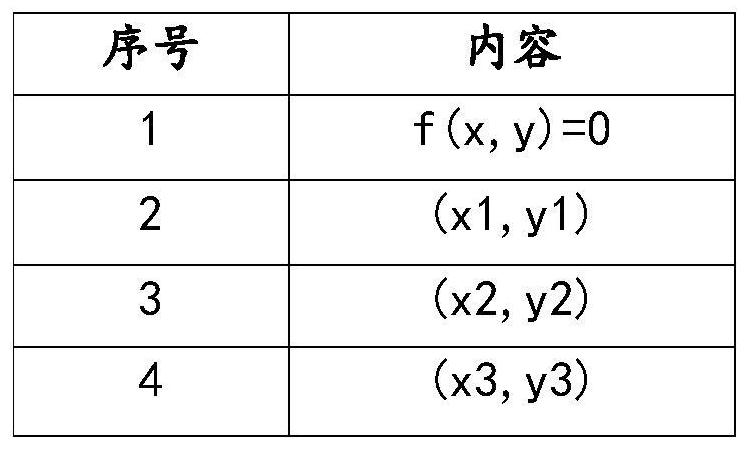
[0037] see Figure 1 to Figure 3 , AGV navigation travel deviation correction method based on BP network, which includes AGV driving deviation correction data acquisition process, AGV driving deviation model training process and AGV driving deviation correction process.
[0038] AGV driving deviation correction data acquisition process, including: preparation phase and acquisition phase.
[0039] The preparation stage of AGV driving deviation correction data acquisition process includes the following steps:
[0040] Step A, installing RFID readers and magnetic sensors on the AGV body;
[0041] Step B, in the working area of the AGV, establish a rectangular coordinate system according to the specific situation, and use the rectangular coordinate system as the global coordinate system for AGV navigation;
[0042] Step C, plan the AGV travel path on t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More