Multi-unmanned aerial vehicle formation flight obstacle avoidance control strategy making method
A technology of formation flight and control strategy, applied in non-electric variable control, control/regulation system, 3D position/channel control and other directions, can solve cumbersome problems and achieve the effect of improving safety and mission success rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The specific implementation of the present invention will be described in detail in combination with the summary of the invention and the drawings.
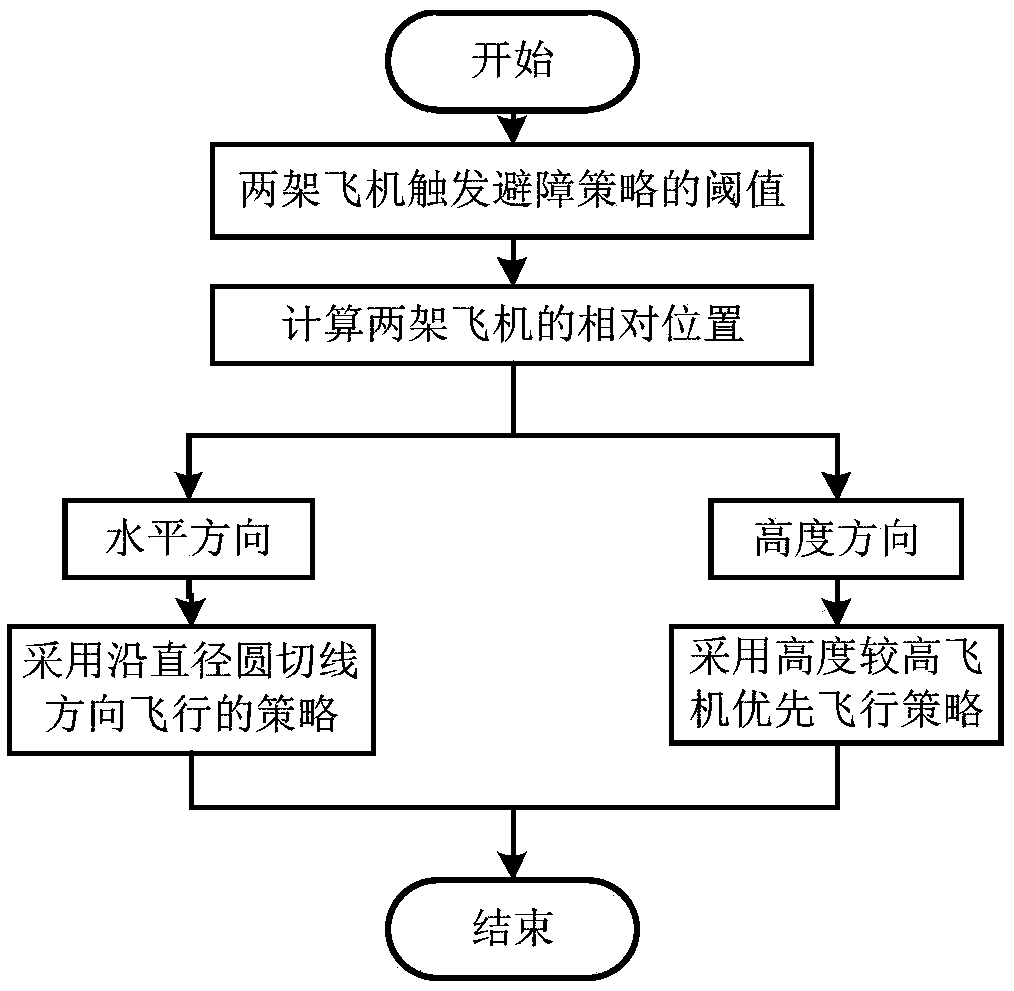
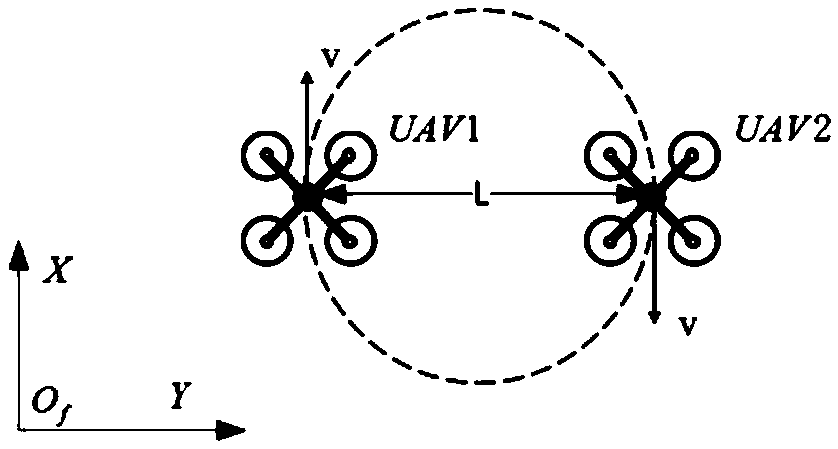
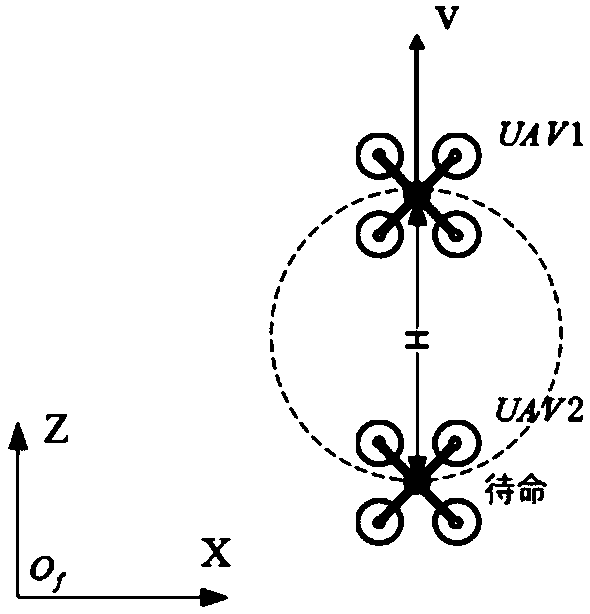
[0036] Step 1. Introduce the repulsion field function U rep (q), through the repulsion field function U rep The size of (q) determines the speed and direction of the movement of the drones after they meet.
[0037] In small-scale formations, through reasonable task allocation and path planning, there is rarely the phenomenon of track points overlap. Of course, double or triple aircraft paths overlap and require obstacle avoidance strategies to complete the task. The repulsion field function is introduced here, and the speed and direction of the movement of the UAV after the encounter is determined by the size of the repulsion field function.
[0038] The traditional repulsion field function does not take the relative distance between the target point and the current position of the UAV into consideration, and it has the problem o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More