Method and device for flexible riser vibration control
What is AI technical title?
AI technical title is built by PatSnap AI team. It summarizes the technical point description of the patent document.
A flexible riser, vibration control technology, applied in mechanical oscillation control, non-electric variable control, adaptive control and other directions, can solve problems such as complex system analysis
Active Publication Date: 2019-06-25
GUANGZHOU UNIVERSITY
View PDF5 Cites 9 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
For marine flexible riser systems, mixed input nonlinearities complicate system analysis
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
no. 1 example
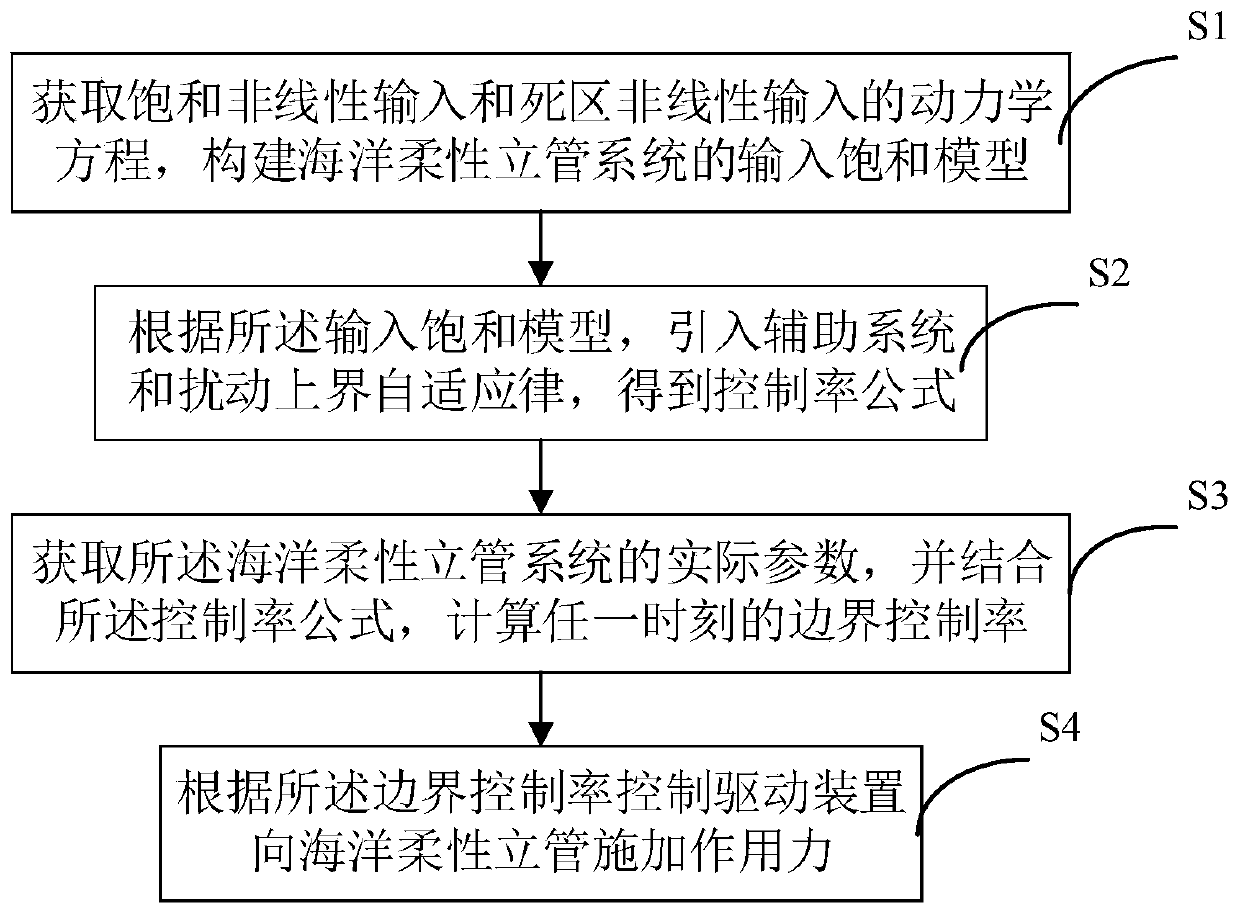
[0094] see figure 1 A method for controlling the vibration of a flexible riser provided in this embodiment can be executed by a related server, and the following descriptions will take the server as an execution subject as an example.
[0095] The method for vibration control of a flexible riser at least includes the following steps S1-S4.
[0096] S1. Obtain the dynamic equations of the saturated nonlinear input and the dead zone nonlinear input, and construct the input saturation model of the marine flexible riser system.
[0097] In a specific embodiment,
[0098] Kinetic equation, for
[0099]
[0100] boundary conditions, for
[0101]
[0102] y(0,t)=y'(0,t)=y"(l,t)=0.
[0103] It should be noted that y(l, t), y′(l, t), y″’(l, t) are y(l, t-1), y′(l, t-1), y″'(l, t-1) and time t Calculated by backward difference.
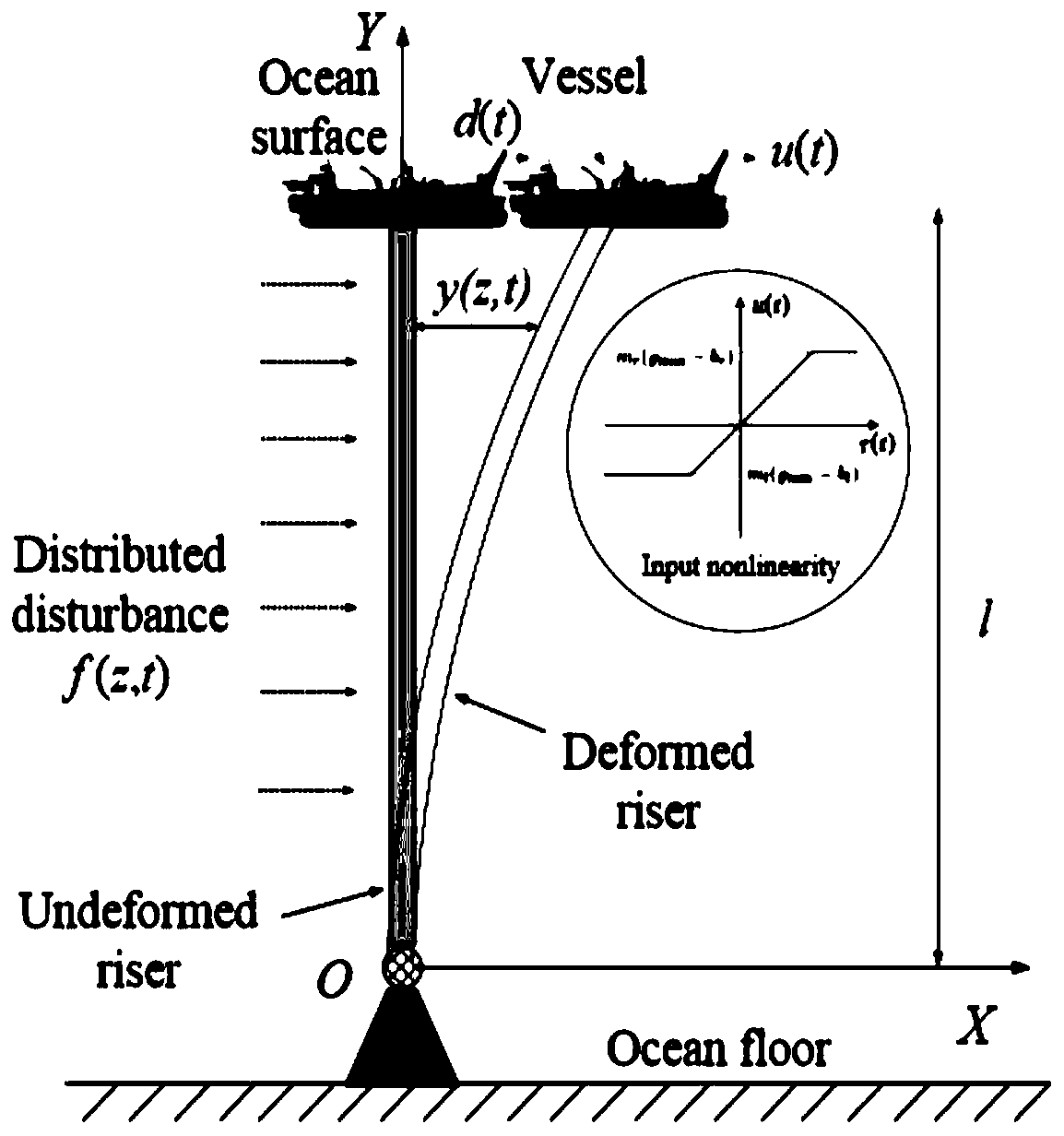
[0104] Among them, z and t represent independent time and space variables, y(z, t) is the vibration displacement of the standpipe at z at time t,...
no. 2 example
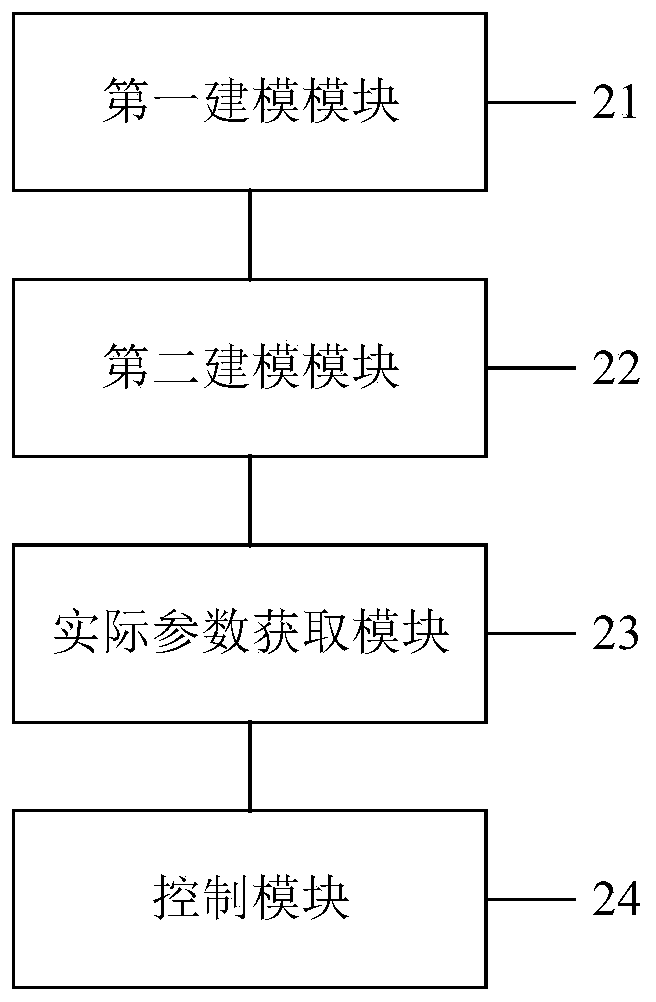
[0147] see figure 2 . This embodiment also proposes a device for controlling the vibration of the flexible riser, which is characterized in that it includes:
[0148] The first modeling module 21 is used to obtain dynamic equations of saturated nonlinear input and dead zone nonlinear input, and construct an input saturation model of the marine flexible riser system;
[0149] The second modeling module 22 is used to introduce an auxiliary system and a disturbance upper bound adaptive law according to the input saturation model to obtain a control rate formula;
[0150] The actual parameter acquisition module 23 is used to acquire the actual parameters of the marine flexible riser system, and calculate the boundary control rate at any time in combination with the control rate formula;
[0151] The control module 24 is configured to control the driving device to apply force to the marine flexible riser according to the boundary control rate.
[0152] In a specific embodiment,...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention discloses a method and device for flexible riser vibration control. The method includes the following steps: the kinetic equation of saturation nonlinear input and dead zone nonlinear input is acquired, the input saturation model of a marine flexible riser system is constructed; an auxiliary system and a disturbance upper bound adaptive law are introduced according to the input saturation model, so that a control rate formula is obtained; the actual parameters of the marine flexible riser system are obtained, with the control rate formula used in combination, a boundary control rate at any time point is calculated; and a driving device is controlled according to the boundary control rate to apply an acting force to the marine flexible riser. With the method and device of theinvention adopted, the influence of mixed nonlinear input on the control performance of the marine flexible riser system can be eliminated; and the control precision and sensitivity of vibration suppression are improved, so that the stability of the system can be improved.
Description
technical field [0001] The invention relates to the technical field of automatic control, in particular to a method and device for vibration control of a flexible riser. Background technique [0002] As energy demand decreases, oil and gas extraction tends to go to deep water. As an important part of offshore oil transmission, offshore flexible risers play a vital role in ocean development. For the large span of the marine flexible riser, under the influence of the harsh marine environment, the marine flexible riser will produce deformation and vibration. Excessive vibration will seriously affect the performance of the marine flexible riser system, reduce its service life, and may even cause serious economic losses and environmental pollution due to its damage. Therefore, structural vibration control in ocean development is an important and unavoidable problem. Boundary control is used as a practical approach to vibration control of flexible riser systems, which avoids th...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More