Multi-arm collaborative operation compliant control method
A compliant control and robotic arm technology, applied in the field of robotics, can solve problems such as difficult to meet precise operations, collisions, injuries, and high costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
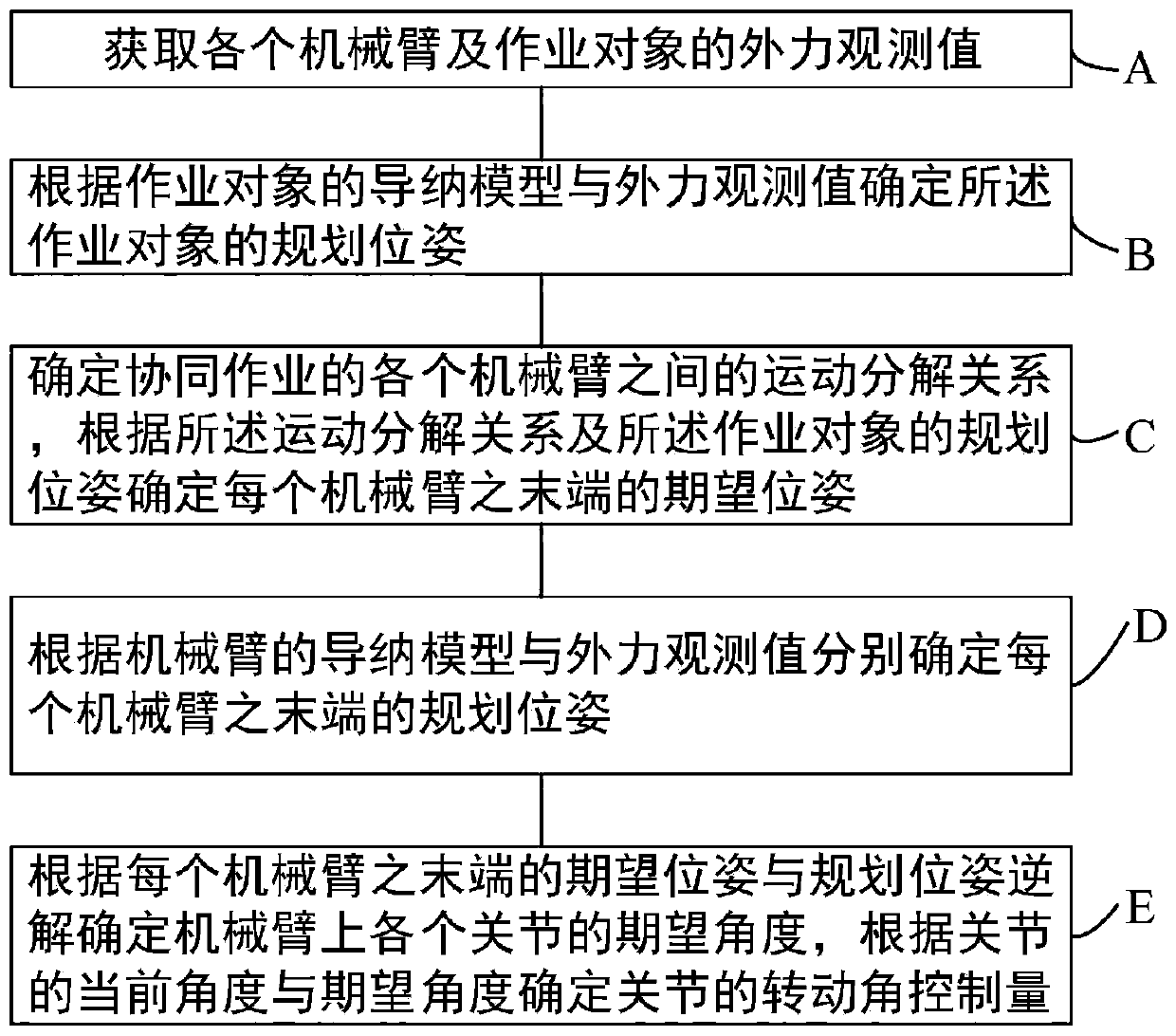
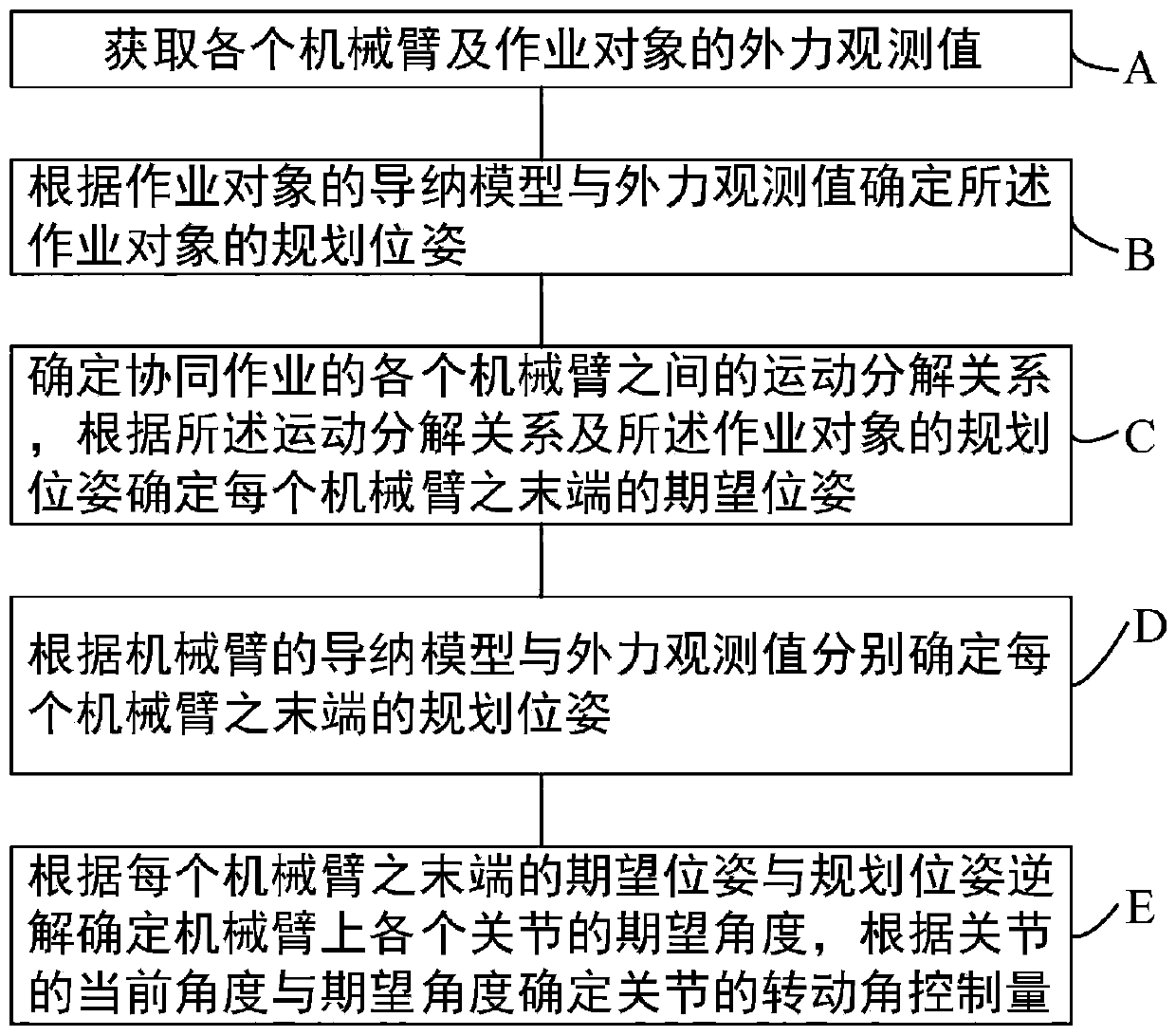
[0027] see figure 1 , this embodiment discloses a specific step of a compliant control method for multi-arm cooperative operation, including:
[0028] Step A: Obtain the external force observation values of each robotic arm and the external force observation value of the work object. The operation object is the object of multi-arm cooperative operation, such as components to be assembled, parts to be cut, etc. The external force observation value is the observation value of the external moment acting on the work object.
[0029] Exemplarily, the external force observation value of the mechanical arm is acquired through the first momentum observer. Among them, the first momentum observer corresponding to the i-th robotic arm is:
[0030]
[0031] In the formula, K i is the gain matrix of the i-th robotic arm; r i is the external moment observation value of the i-th robotic arm; P i (t) is the generalized momentum of the i-th robotic arm; is the Coriolis matrix of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com