

A remote controller for a high-mobility ground unmanned platform and its remote control method
An unmanned platform and remote control technology, which is applied in the direction of instruments, signal transmission systems, electrical components, etc., can solve the problems of poor expansion and re-upgrade ability of platform remote control, multiple functions of high-mobility ground unmanned platforms, and high operating skills requirements of operators. problems, to achieve good human-computer interaction, improve control comfort, and wide application range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
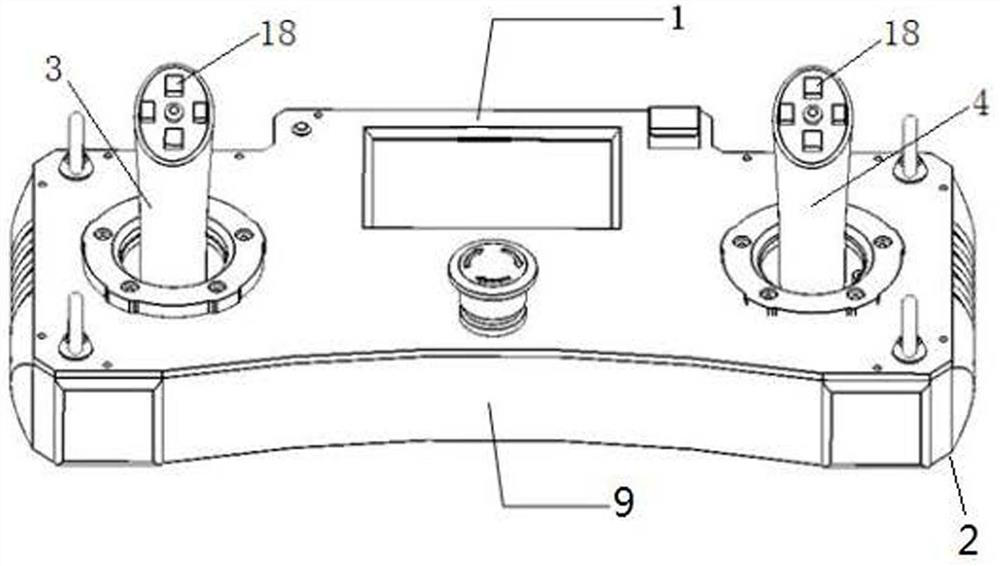
[0029] like figure 1 As shown, a remote control of a high-mobility ground unmanned platform includes: a complete machine 2 composed of a remote control panel 1 and a casing 9 .
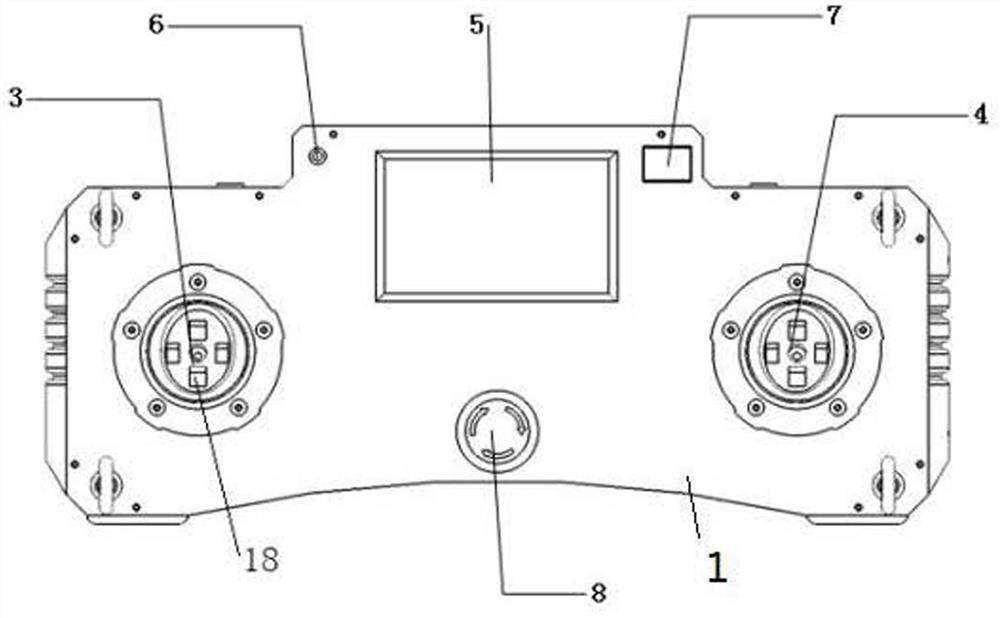
[0030] like figure 2As shown, the remote control panel 1 is equipped with a left handle 3, a right handle 4, a display screen 5, an indicator light 6, a power switch 7, and an emergency stop switch 8. Mutual replacement; the handle has three movement dimensions of horizontal (X direction), vertical (Y direction) and rotation (Z direction), on which there are multiple composite control buttons 18, through the combination of the three movement dimensions of the handle and the composite control buttons 18 , the left handle 3 completes the conventional action control of the platform, such as walking, turning, lights, and horns; The display of platform status information and the input of touch commands; the indicator light 6 is used for alarming when the platform status is abnormal; the power switch 7 i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More