

Dynamic planning method for unmanned aerial vehicle path based on two-dimensional and three-dimensional integration
A dynamic planning and unmanned aerial vehicle technology, applied in the field of unmanned aerial vehicles, can solve the problems of lack of UAV path height safety constraints, lack of height safety constraints of two-dimensional dynamic path planning, UAV differences, etc. Effectiveness and planning efficiency are improved, dynamic planning efficiency is improved, and safety constraints are improved.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
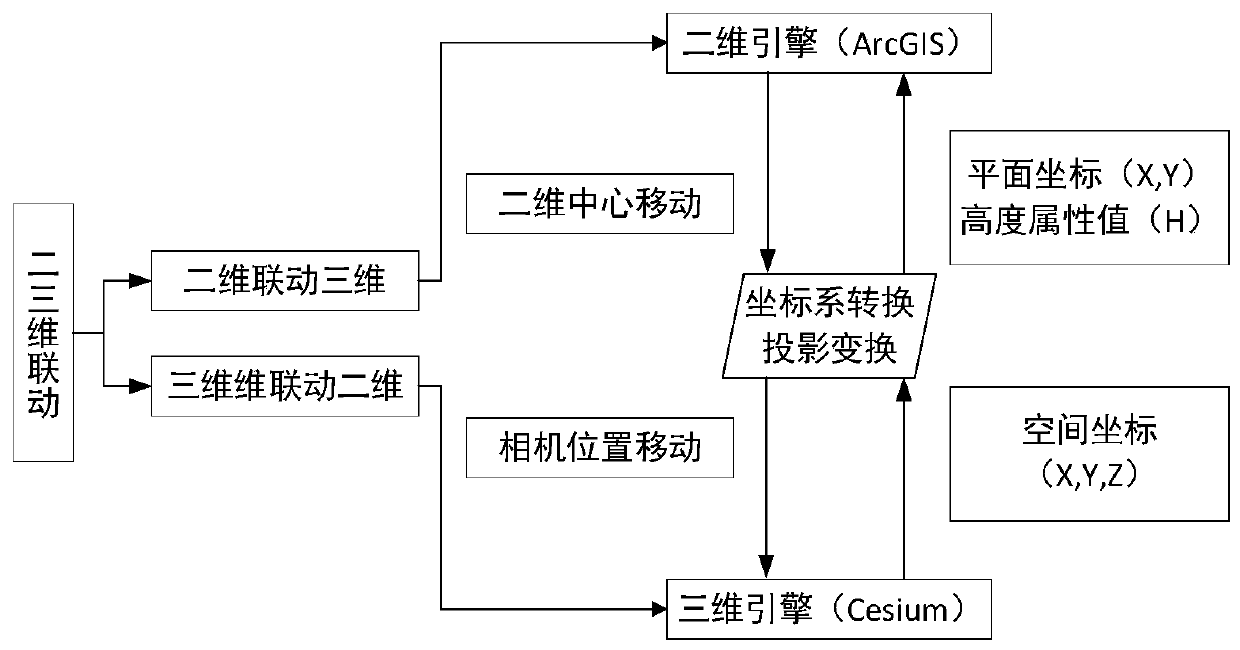
[0037] The method of the present invention first performs oblique photographic modeling on the path planning area of the UAV, and then based on the 2D and 3D integration technology, such as figure 1 As shown, the initial path of the UAV that satisfies the kinematic constraints is planned in the two-dimensional map window, and at the same time, the oblique photographic model is realized in the three-dimensional full-element real-scene map window with the visibility algorithm and the limited surface analysis algorithm in the GIS aerial analysis function The three-dimensional path of the UAV in satisfies the security constraints, and the specific implementation steps are as follows:
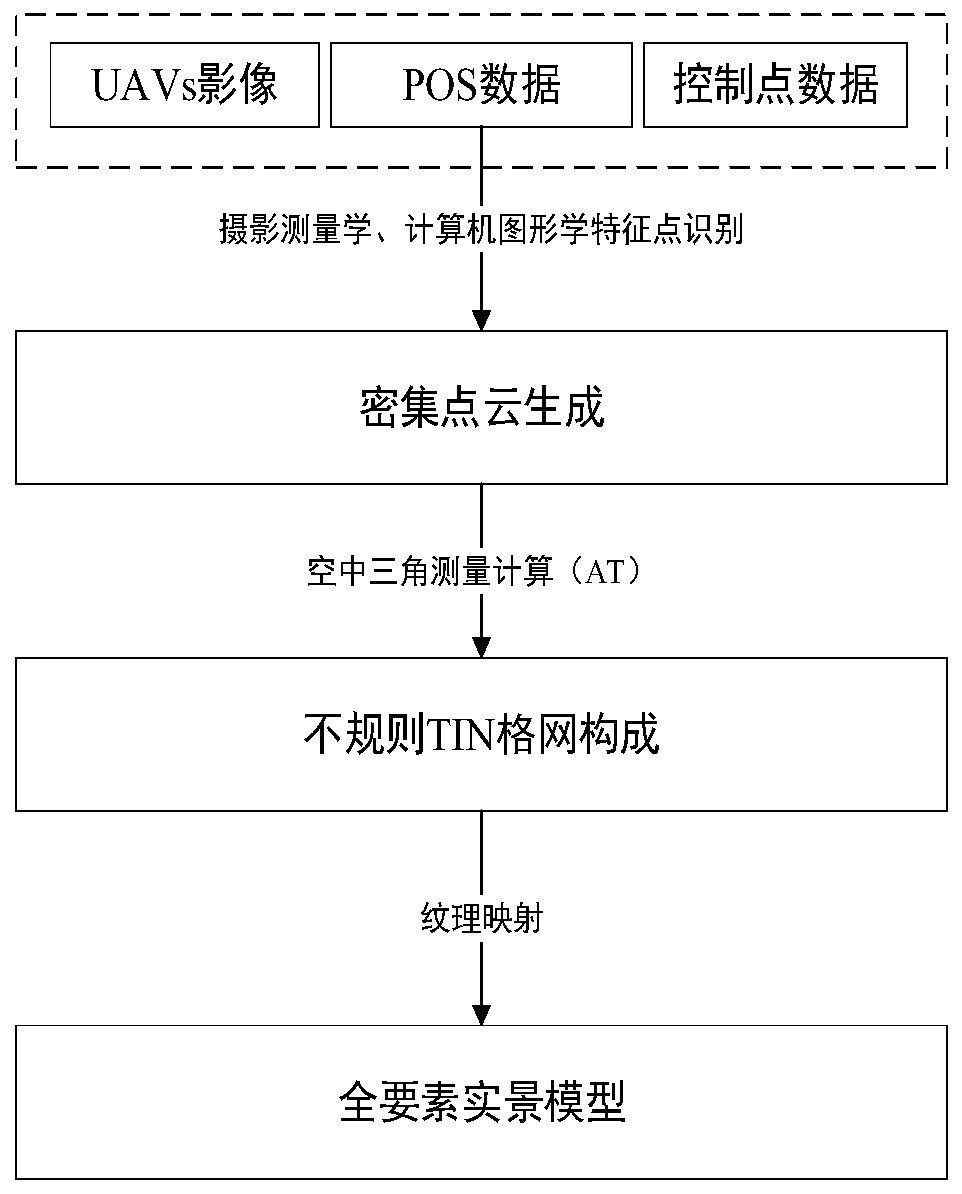
[0038] (1) Oblique photographic modeling of the UAV path planning area
[0039] With the development of photogrammetry and computer graphics, "digital earth" has become a trend and gradually formed. The current oblique photography technology realizes rapid real-world modeling of the survey area t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More