

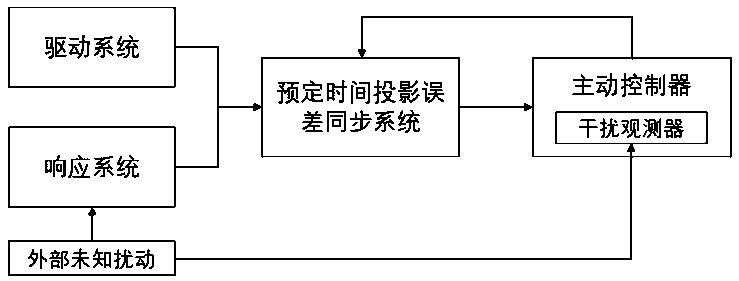
Predetermined time projection synchronization method of delay memristor neural network with unknown disturbance resistance
A predetermined time, neural network technology, applied in instruments, adaptive control, control/regulation systems, etc., can solve problems such as difficulty in finding the direct relationship between system gain and upper limit of convergence time, interference, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment 1
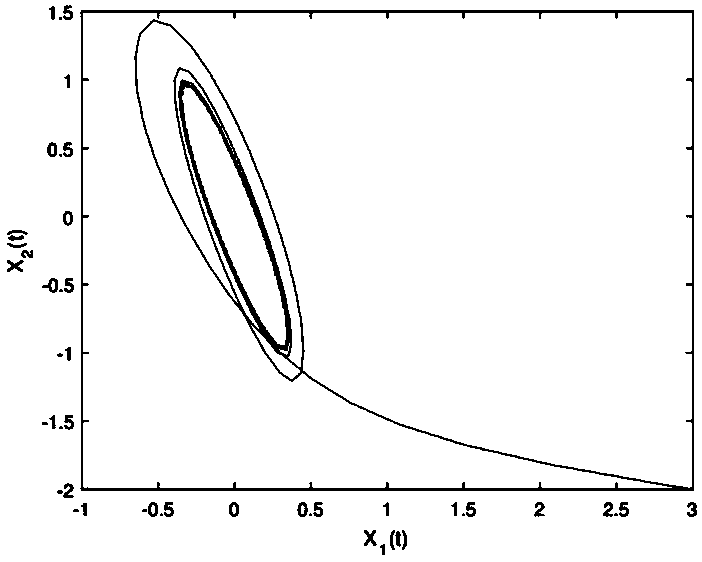
[0148] The state equation of the driving system is:
[0149]
[0150] Among them, the driving system is a 2-dimensional chaotic system, x i The initial state of (t) is set to [3,-2] T . figure 2 Expressed as the chaotic behavior of the system.
[0151] The state equation of the response system is:
[0152]
[0153] Among them, the response system is a 2-dimensional chaotic system, y i The initial state of (t) is set to [-1,1.5] T . Here are the settings for some known parameters:
[0154]
[0155]
[0156]
[0157]
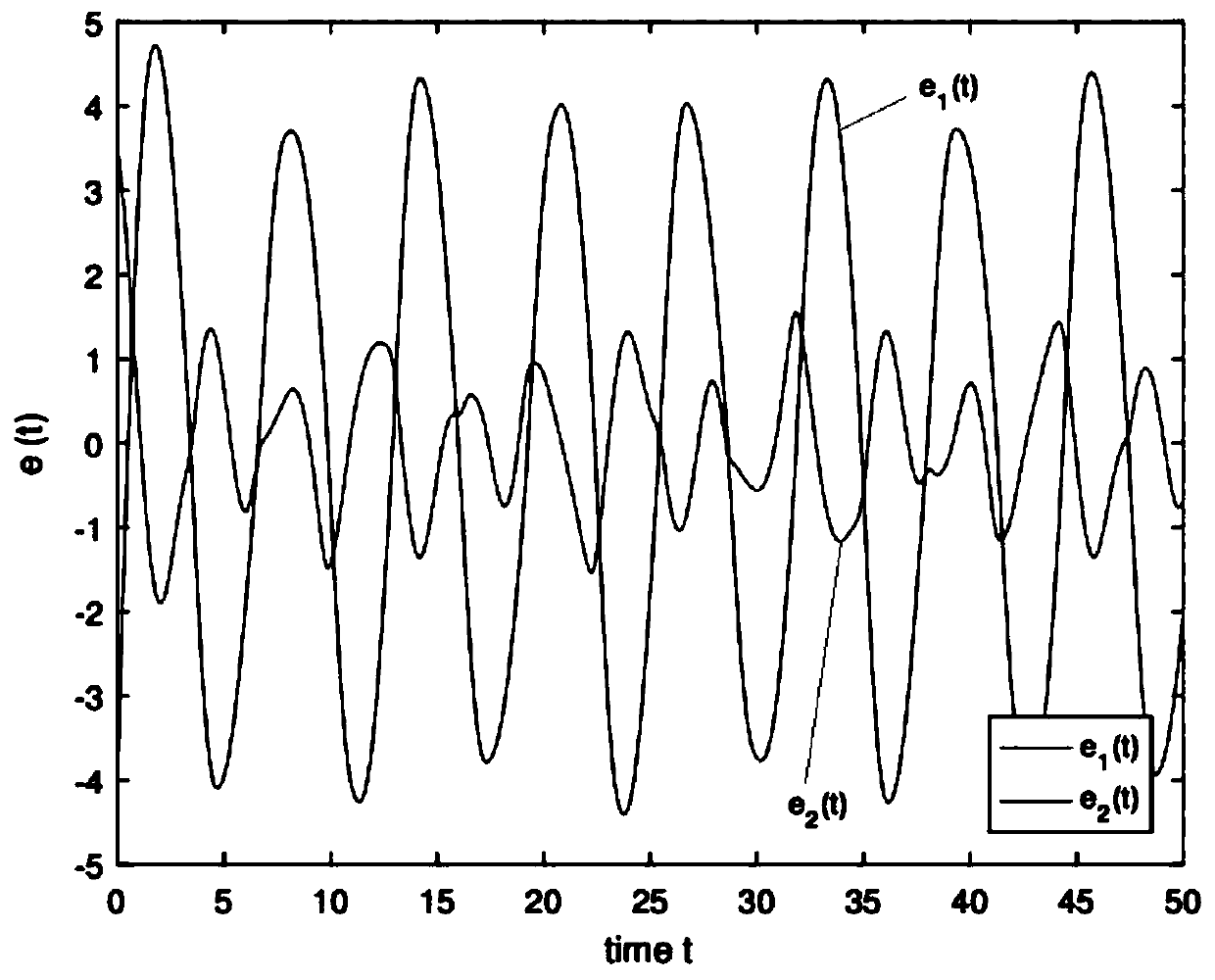
[0158] The projection error of the drive-response system is set as:
[0159] e i (t)=y i (t)-x i (t); (23)
[0160] image 3 Expressed as the response curve of the projected synchronization error in the absence of active controller input.
[0161] (1-1) Assuming that there is no unknown disturbance outside, then there is no need to use the disturbance observer to compensate the error effect caused by the unknown disturbance. At thi...
specific Embodiment 2
[0177] drive systemx i The initial state of (t) is set to [3,-0.5] T , the response system y i The initial state of (t) is set to [-2,4] T . Here are the settings for some known parameters:
[0178]
[0179]
[0180] ω(t)=sint, τ(t)=1, q=2,b 1 =0.2,b2 =0.1,c 1 = 1,c 2 =1.5, w(0)=-0.5,
[0181]
[0182] (2-1) Setting T c1 =T c2 =0.5, according to the satisfaction condition of the gain control parameter in step 5, wherein the gain control parameter is set to k 1 = 3,k 2 = 1,w 1 =11,w 2 =9, h 11 = 2.2, h 12 = 1.4, h 21 = 1.4, h 22 = 2.5. The control parameters are shown in formula (29), and the simulation experiment is carried out. Figure 6 (a) shows the synchronous error response curve projected at a predetermined time under the input of active controllers (14) and (15). exist Figure 6 In (a), the system converges to zero at 0.3759s.
[0183] (2-2) Setting T c1 =T c2 = 1.0, according to the satisfaction condition of the gain control parameter ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More