

Unmanned aerial vehicle cluster cooperative task planning method for air maneuvering combat
A mission planning and unmanned aerial vehicle technology, applied in non-electric variable control, position/direction control, instruments, etc., can solve problems such as poor solution space search ability, unsatisfactory optimization results, and long time consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
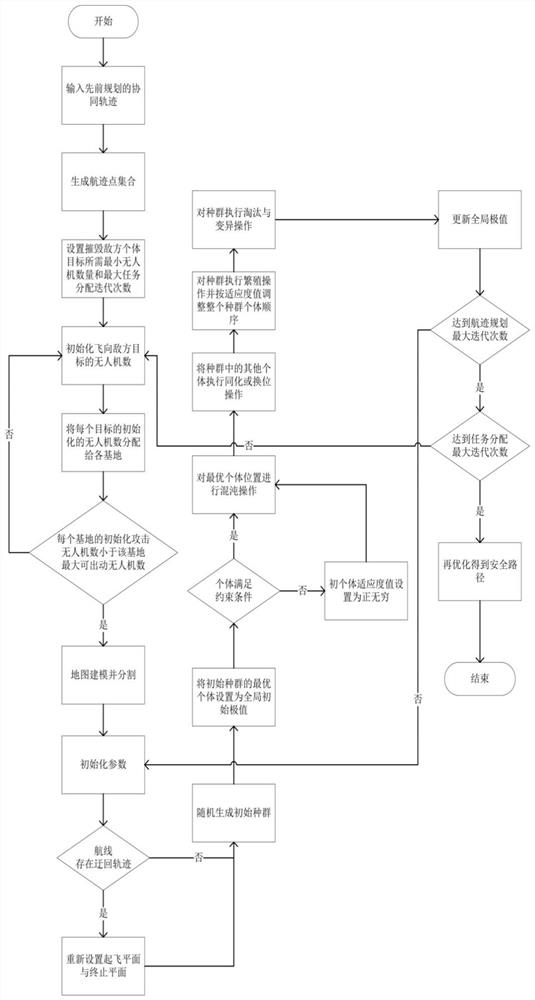
[0073] This embodiment discloses a coordinated task planning method for UAV clusters oriented to air maneuvering operations. The specific implementation steps are as follows:
[0074] Step 1. The establishment of a mathematical model for UAV collaborative mission planning.
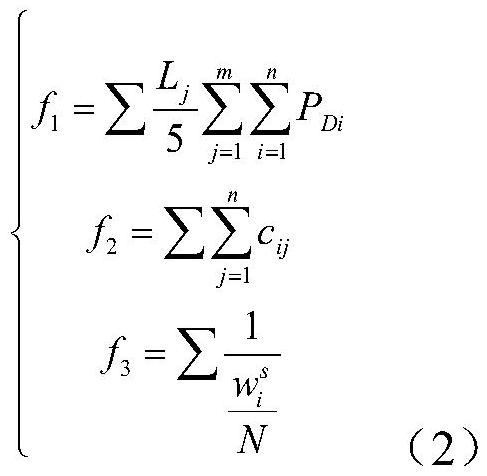
[0075] The mathematical model of UAV cooperative mission planning established according to the maximum range distance constraint, maximum turning angle, maximum climb and dive angle, minimum and maximum flight altitude, minimum safe distance between UAVs and mission planning purpose of each UAV is as follows: Shown in (29)-(35):
[0076] The objective function of UAV collaborative mission planning:
[0077] min(f 1 , f 2 , f 3 ) (29)
[0078]
[0079] UAV maximum turning angle constraint:
[0080]
[0081] UAV maximum climb and dive angle constraints:
[0082]
[0083] Drone minimum / maximum flight height constraints:
[0084]
[0085] Collision avoidance constraints between UAVs:
[00...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More