

Self-walking mower
A self-propelled lawn mower technology, applied in the direction of harvesters, cutters, agricultural machinery and implements, etc., can solve problems such as being unfavorable to the precise positioning of self-propelled lawn mowers, interfering with the judgment of displacement, and easily slipping wheels.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
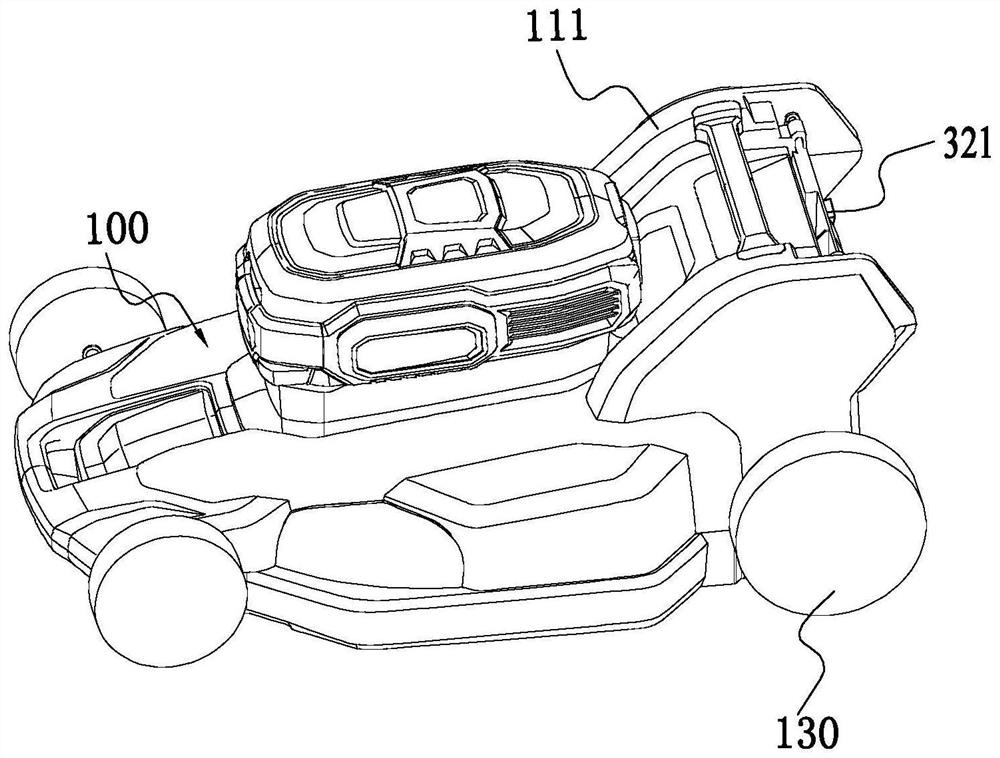
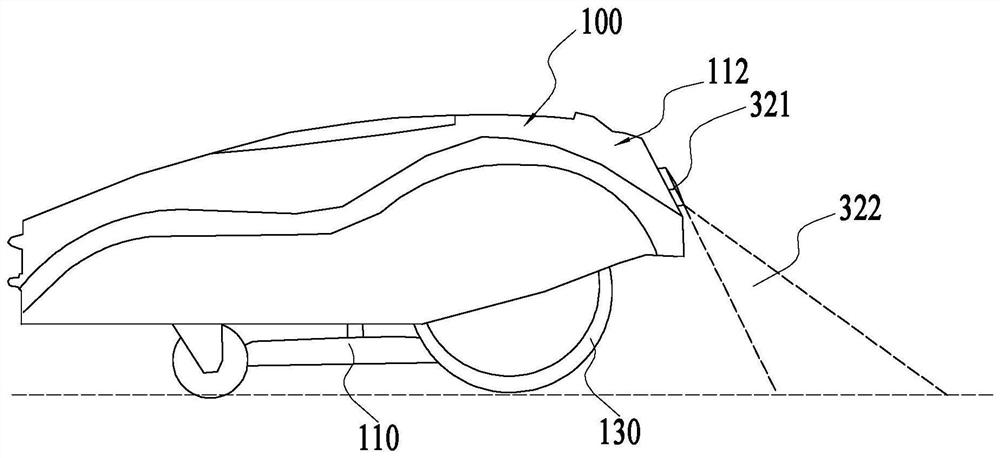
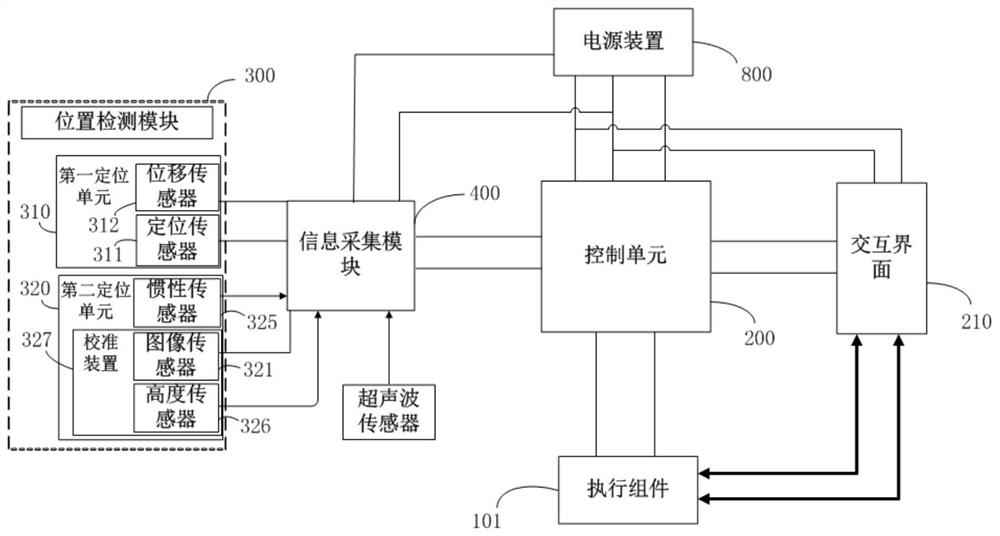
[0029] In one embodiment of the present invention, the present invention proposes a kind of self-propelled mower, with reference to Figure 1 to Figure 3b , the self-propelled lawn mower can be used to automatically mow the lawn and trim the lawn. The self-propelled mower at least includes a main body 100 and an executive assembly 101 connected to the main body. The executive assembly 101 includes a cutting blade 110 arranged on the main body 100 , and usually the cutting blade 110 is arranged under the main body 100 . The execution assembly 101 also includes an output motor 120 for driving the cutting blade 110 to rotate, and the cutting blade 110 is driven to rotate by the output motor 120 for cutting vegetation. The executive assembly 101 includes a drive wheel 130 and a drive motor 140 that provides driving force to the drive wheel 130 to rotate. The self-propelled mower includes a control unit 200 connected to the drive motor 140. The control unit 200 controls the drive m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More