

Man-machine co-driving transverse control method with conflict resolution function
A conflict resolution and lateral control technology, applied in the direction of control devices, driver input parameters, vehicle components, etc., can solve the problems of driver interference, increase driver operating load, and failure to take into account, and achieve the effect of reducing operating load
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0091] see Figure 1 to Figure 5 Shown:
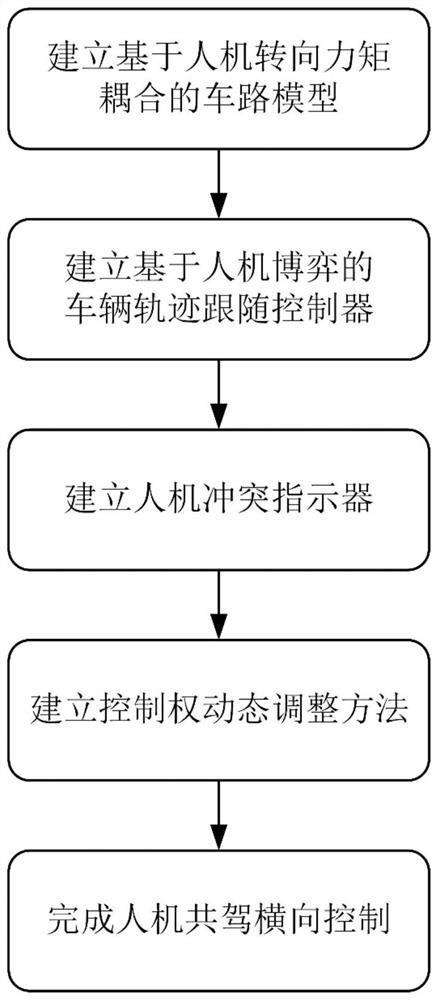
[0092] The human-machine co-driving lateral control method with conflict resolution function provided by the present invention comprises the following steps:
[0093] Step 1. Establish a vehicle-road model based on human-machine steering torque coupling:
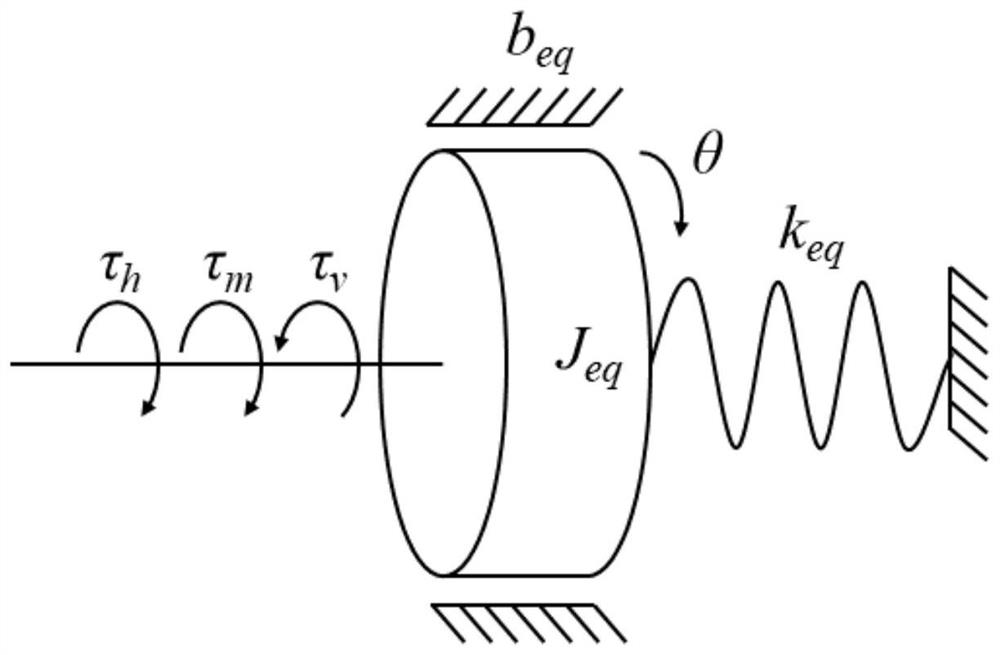
[0094] The vehicle steering system is modeled as follows:
[0095]
[0096] In the formula, J eq , k eq and b eq are the moment of inertia, stiffness and damping of the steering system equivalent to the steering wheel; θ is the steering wheel angle; τ v is the equivalent steering resistance torque of the steering system on the steering wheel; τ h and τ m are the steering torque applied to the steering wheel by the driver and the machine system, respectively;
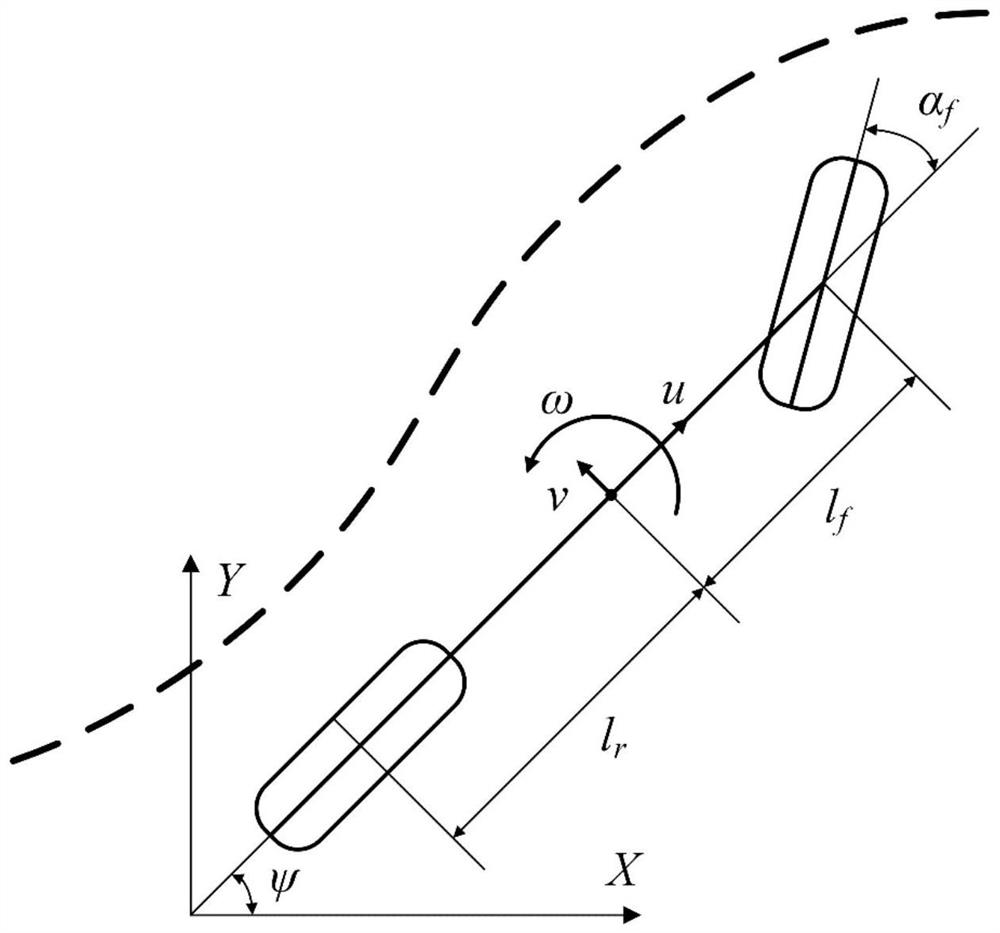
[0097] Under applicable working conditions, the steering resistance torque is mainly proportional to the front wheel angle, namely:
[0098] τ v = K v alpha f (2)
[0099] In the formula, K v is the resistance...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More