

Vehicle driving method and device and unmanned vehicle
An unmanned vehicle and vehicle technology, applied in the field of driving vehicles, can solve problems such as the failure of unmanned vehicles to merge, and achieve the effect of ensuring driving time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
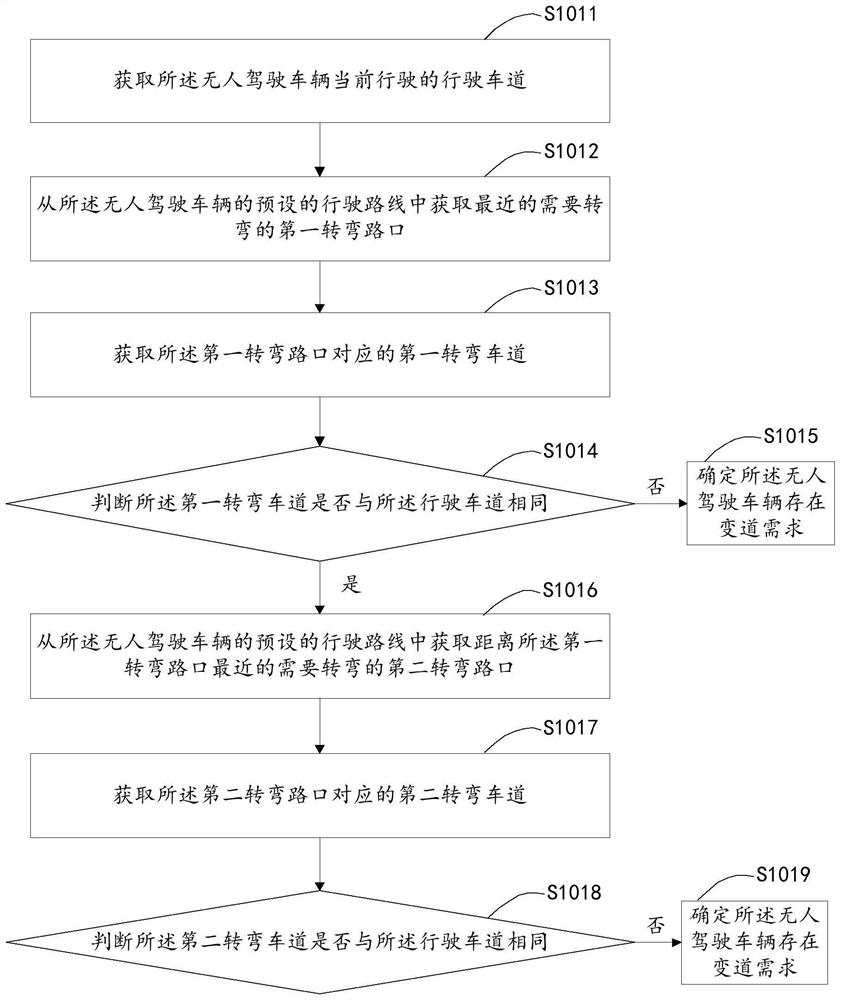
[0026] see figure 1 , figure 1 It is a schematic flowchart of a method for driving a vehicle provided by an embodiment of the present invention, and the method includes the following steps:
[0027]Step S101 , according to the preset driving route of the unmanned vehicle, determine whether the unmanned vehicle needs to change lanes, and if so, execute step S102 .
[0028] Wherein, if the unmanned vehicle does not need to change lanes, it is only necessary to control the unmanned vehicle to drive on the current driving lane, and after the preset time, step S101 is executed, that is, after the preset time, the Determine whether the driverless vehicle needs to change lanes.
[0029] When the user uses the driverless vehicle, a preset driving route from the origin to the destination will be generated. The preset driving route may be a driving route recommended by the unmanned vehicle according to the driving time, starting point, destination and the user's driving habits, or ma...
Embodiment 2
[0115] see Figure 9 , Figure 9 It is a schematic diagram of a device for driving a vehicle provided by an embodiment of the present invention. The device 400 includes: a first judgment module 401, an acquisition module 402, a second judgment module 403, a first control module 404, a third judgment module 405, a A second control module 406 , a fourth judgment module 407 and a third control module 408 . Wherein, the first judgment module 401 is used for judging whether the unmanned vehicle needs to change lanes according to the preset driving route of the unmanned vehicle; the obtaining module 402 is used for if the unmanned vehicle needs to change lanes If there is a lane change requirement, the target lane corresponding to the lane change requirement is obtained; the second judgment module 403 is used for when the target lane has the first non-merging road section, a first mergeable road segment, a second non-mergeable road segment, a second mergeable road segment, a third...
Embodiment 3
[0124] see Figure 10 , Figure 10 It is a schematic diagram of the hardware structure of the unmanned vehicle provided by the embodiment of the present invention. The unmanned vehicle 500 includes: one or more processors 501 and a memory 502, Figure 10 Take a memory as an example.
[0125] The processor 501 and the memory 502 may be connected through a bus or in other manners. In this embodiment of the present invention, the connection through a bus is used as an example.
[0126]As a non-volatile computer-readable storage medium, the memory 502 can be used to store non-volatile software programs, non-volatile computer-executable programs and modules, such as programs corresponding to the method for driving a vehicle in the embodiment of the present invention Directives / modules (e.g. attached Figure 9 modules shown). The processor 501 executes various functional applications and data processing of the device for driving the vehicle by running the non-volatile software ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More