Method and device for active adjustment of mechanical arm pose, mechanical arm and readable storage medium
An adjustment method and a technology of a robotic arm, applied in the direction of manipulators, program-controlled manipulators, claw arms, etc., can solve problems such as actual situation errors, delays in surgical progress, and surgical accidents, so as to improve the accuracy of reset and avoid medical accidents. The effect of shortening the reset time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
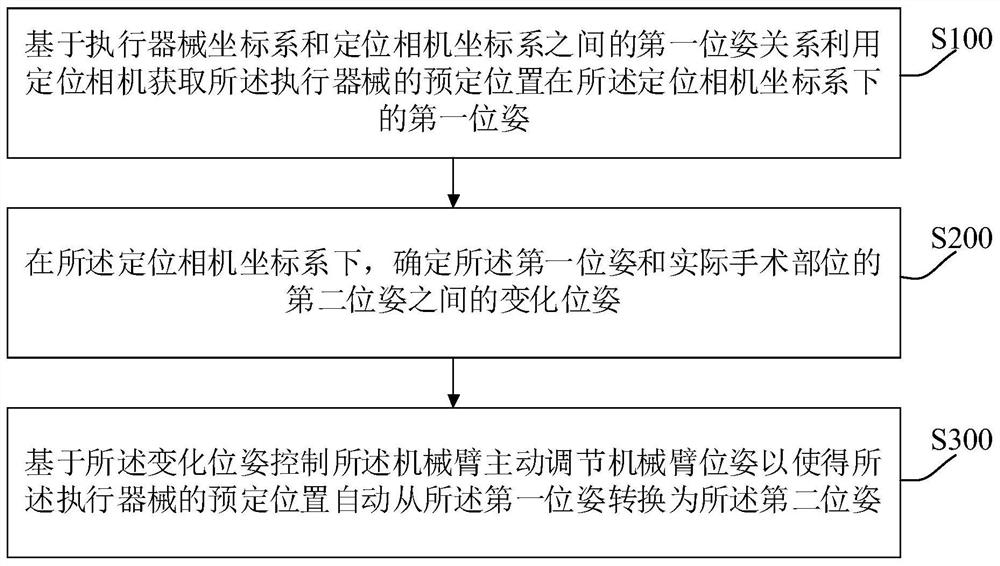
[0070] For an example of this application, see figure 2 , a method for actively adjusting the pose of a robotic arm is proposed, including the following steps S100, S200 and S300:
[0071] In step S100 , based on the first pose relationship between the coordinate system of the implementing instrument and the coordinate system of the positioning camera, the positioning camera is used to obtain a first pose of a predetermined position of the implementing instrument in the coordinate system of the positioning camera.
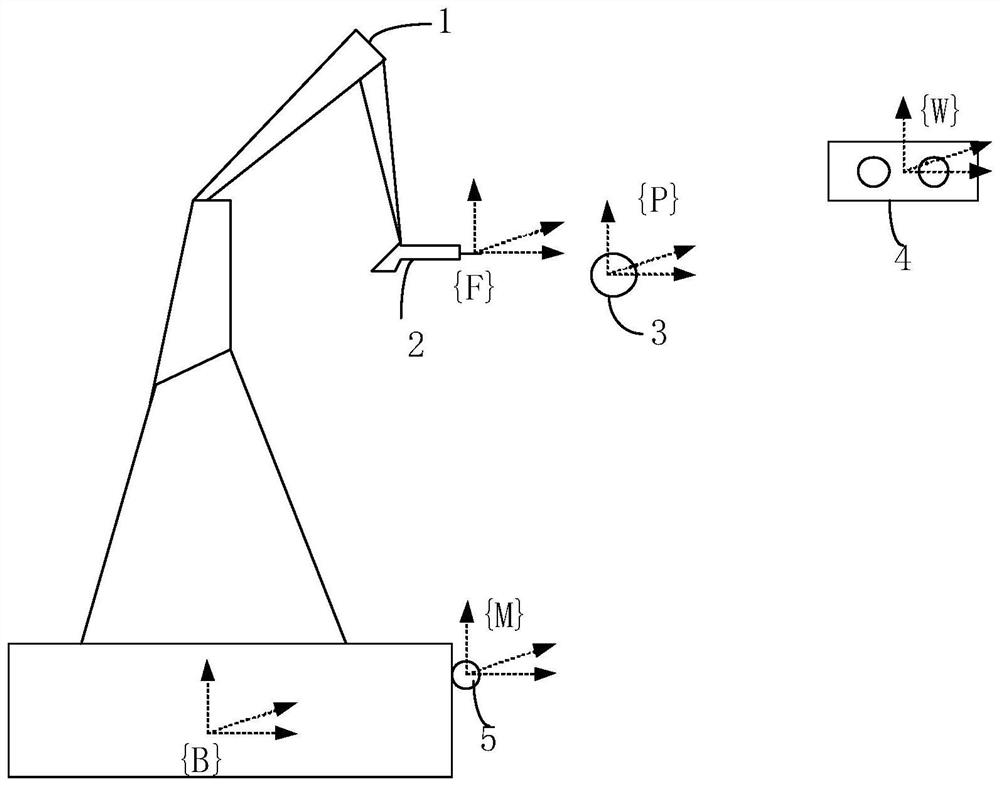
[0072] Exemplary, see image 3 , shows an active adjustment system for the position and posture of the manipulator, wherein a positioning target 5 used in conjunction with the positioning camera 4 is installed at a predetermined position on the base of the manipulator 1, and an actuator 2 is installed at the end of the manipulator 1, { B} is the coordinate system of the base, {F} is the coordinate system of the performing instrument, {P} is the coordinate system o...
Embodiment 2
[0097] For another embodiment of the application, see Figure 4 , a device 10 for active adjustment of the pose and posture of a manipulator is proposed, including: an acquisition module 11 , a determination module 12 and an adjustment module 13 .
[0098] An acquisition module 11, configured to use the positioning camera to acquire the first pose of the predetermined position of the implementing instrument under the coordinate system of the positioning camera based on the first pose relationship between the coordinate system of the implementing instrument and the coordinate system of the positioning camera; determine Module 12, used to determine the change pose between the first pose and the second pose of the actual surgical site under the coordinate system of the positioning camera; an adjustment module 13, used to control the pose based on the change pose The mechanical arm actively adjusts the pose of the robotic arm so that the predetermined position of the implementing ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More