

Target pose estimation method based on adaptive Gaussian weight fast point feature histogram
A point feature histogram, pose estimation technology, applied in computing, image enhancement, image analysis and other directions, can solve the problems of large difference in weight coefficients of neighboring points, low accuracy and efficiency, poor robustness, etc., to overcome robustness Poor performance, reduced time required, and improved real-time pose estimation efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
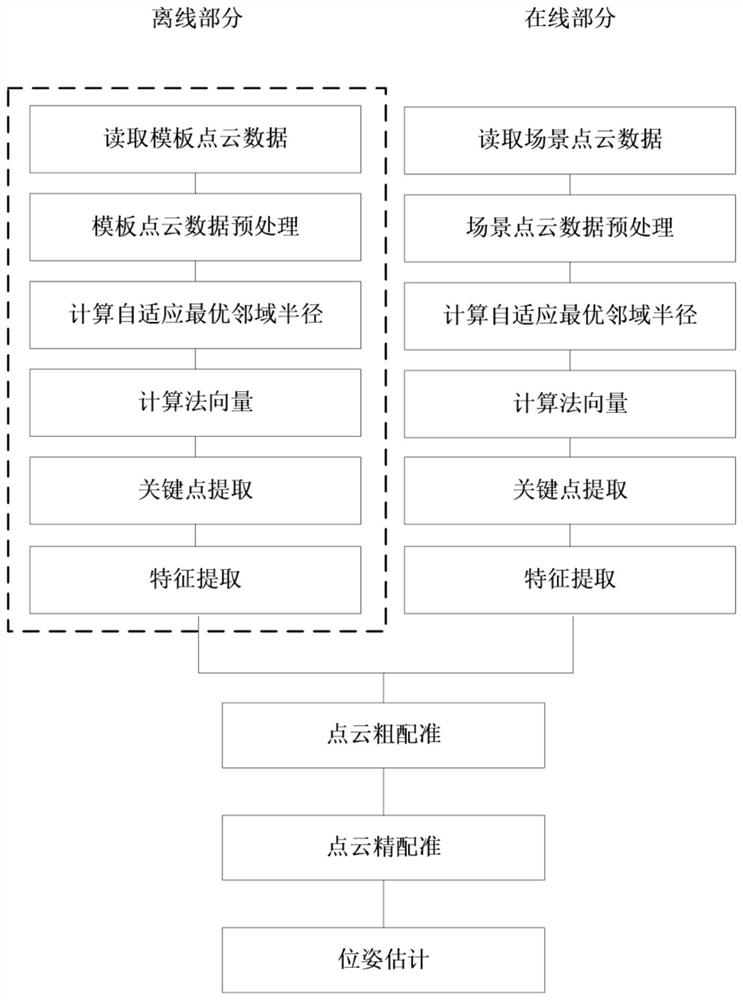
[0062] The target pose estimation method based on the adaptive Gaussian weight fast point feature histogram, specifically includes the following steps:
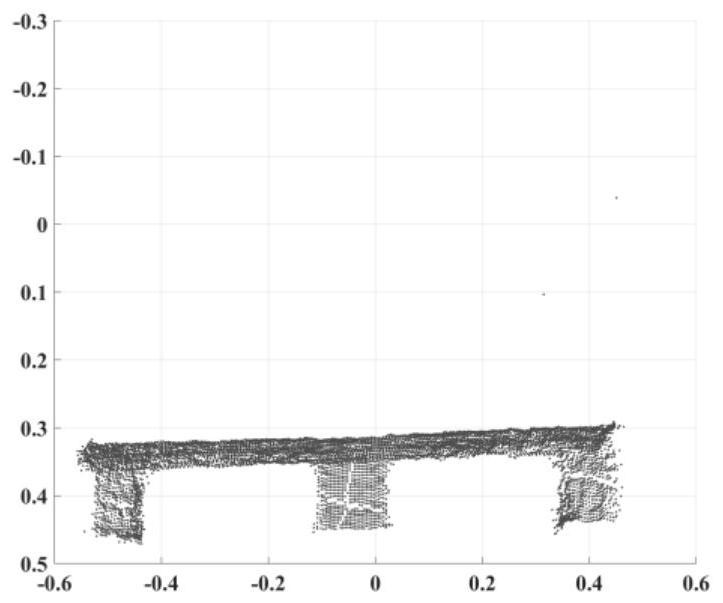
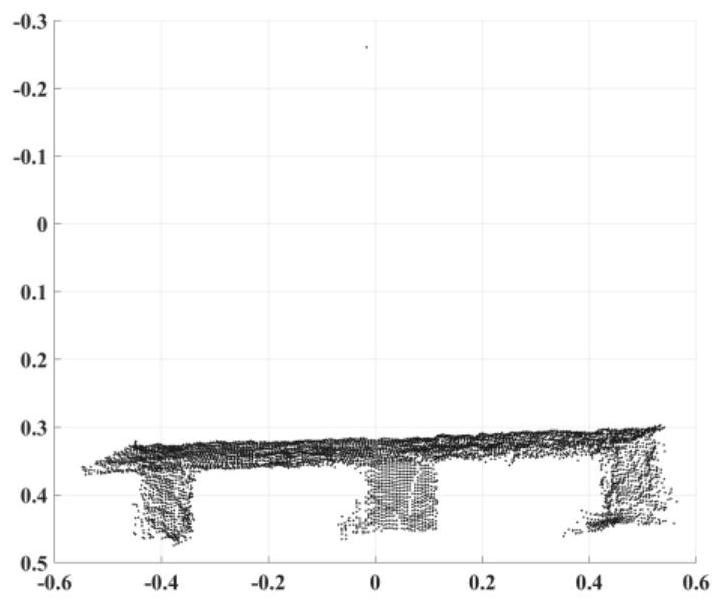
[0063] Step S1: Read point cloud data: read the pallet template point cloud data and the initial scene point cloud data collected by Kinect V2, the data is in ply format, extract the point cloud three-dimensional coordinate information, there are 78894 points in the template point cloud data, There are 103995 points in the initial scene point cloud data, and the reading results are as follows figure 2 shown;
[0064] Step S2: Data preprocessing: use the pcdownsample function to perform voxel grid preprocessing on the template point cloud data and the initial scene point cloud data, and obtain the preprocessed scene point cloud data;
[0065] Step S3: Obtain the adaptive optimal neighborhood radius: the minimum neighborhood radius r_min=0.006m, the maximum neighborhood radius r_max=0.01 m, the radius interval is 0.001 m, cal...
Embodiment 2
[0085] The target pose estimation method based on the adaptive Gaussian weight fast point feature histogram, specifically includes the following steps:
[0086] Step S1: Read point cloud data: read the template point cloud data "dragonStandRight_0" and the initial scene point cloud data "dragonStandRight_24" in the Kinect dataset. The data is in ply format and only contains 3D coordinate information. There are 41841 template point cloud data points, the initial scene point cloud data has 34836 points;
[0087] Step S2: Data preprocessing: use the pcdownsample function to perform voxel grid preprocessing on the template point cloud data and the initial scene point cloud data, and obtain the preprocessed scene point cloud data;
[0088] Step S3: Obtain the adaptive optimal neighborhood radius: the minimum neighborhood radius r_min=0.006m, the maximum neighborhood radius r_max=0.012m, the radius interval is 0.001m, calculate the feature entropy corresponding to different neighbor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More