A Prediction and Correction Method Based on Inertial Integrated Navigation Data
A technology of navigation data and correction method, which is applied in the field of navigation, can solve the problems of low sensitivity and precision of inertial navigation data processing, and achieve the effect of preventing interference and improving sensitivity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] The preferred embodiments of the present invention will be described below with reference to the accompanying drawings. It should be understood that the preferred embodiments described herein are only used to illustrate and explain the present invention, but not to limit the present invention.
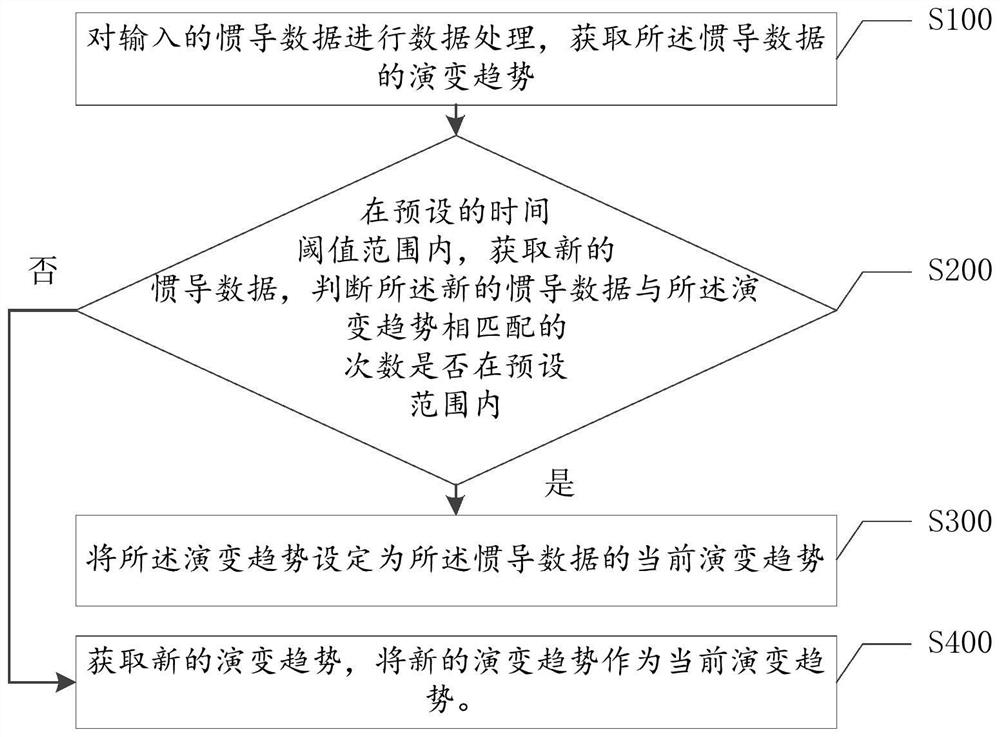
[0061] The embodiment of the present invention provides an estimation and correction method based on inertial integrated navigation data, figure 1 It is a flowchart of an estimation and correction method based on inertial integrated navigation data in an embodiment of the present invention, please refer to figure 1 , the method includes the following steps:
[0062] S100, performing data processing on the input inertial navigation data to obtain an evolution trend of the inertial navigation data;
[0063] S200, within a preset time threshold range, acquire new inertial navigation data, and determine whether the number of times the new inertial navigation data matches the evolut...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap