

Point cloud fusion method and system based on symmetry plane
A fusion method, a technology of symmetrical planes, applied in image data processing, instrumentation, 3D modeling, etc., can solve the problems of point cloud layering and overlapping, achieve strong parallelism, strong anti-noise, and improve computing efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
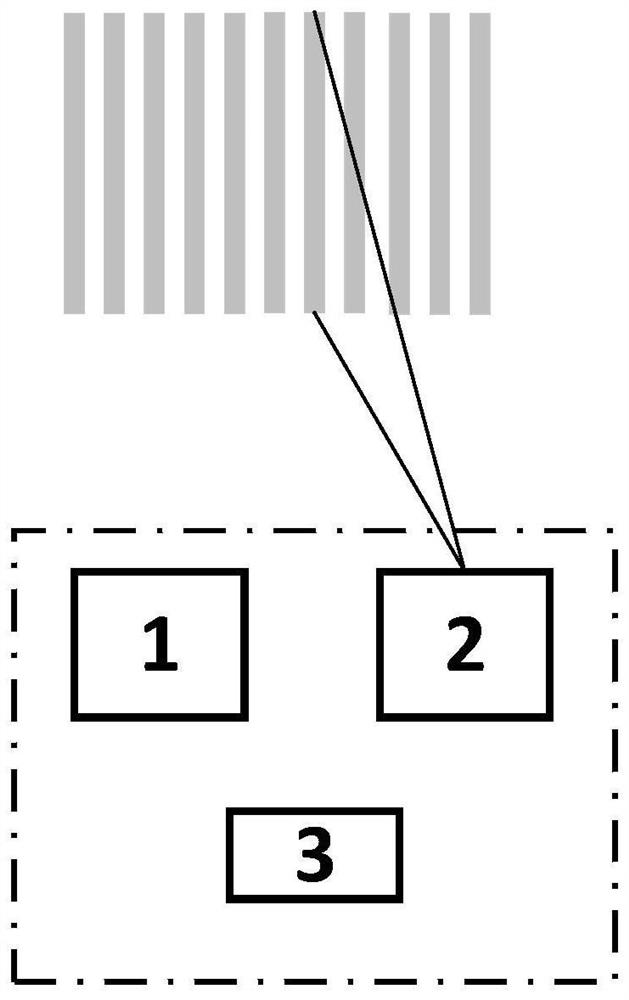
[0174] From Figure 2a It can be seen from the figure that the structured light depth camera involved in this embodiment mainly includes the following three parts: an image receiving module 1 , an encoded structured light projection module 2 , and a system main control module 3 . The encoded structured light projection module 2 projects the encoded structured light; the image receiving module 1 collects the image of the encoded structured light reflected from the object to be measured; the system main control module 3 is electrically connected with the encoded structured light projecting module 2 and the image receiving module 1, and receives The image collected by the image receiving module 1 is processed and fused to obtain a 3D point cloud of the measured object.
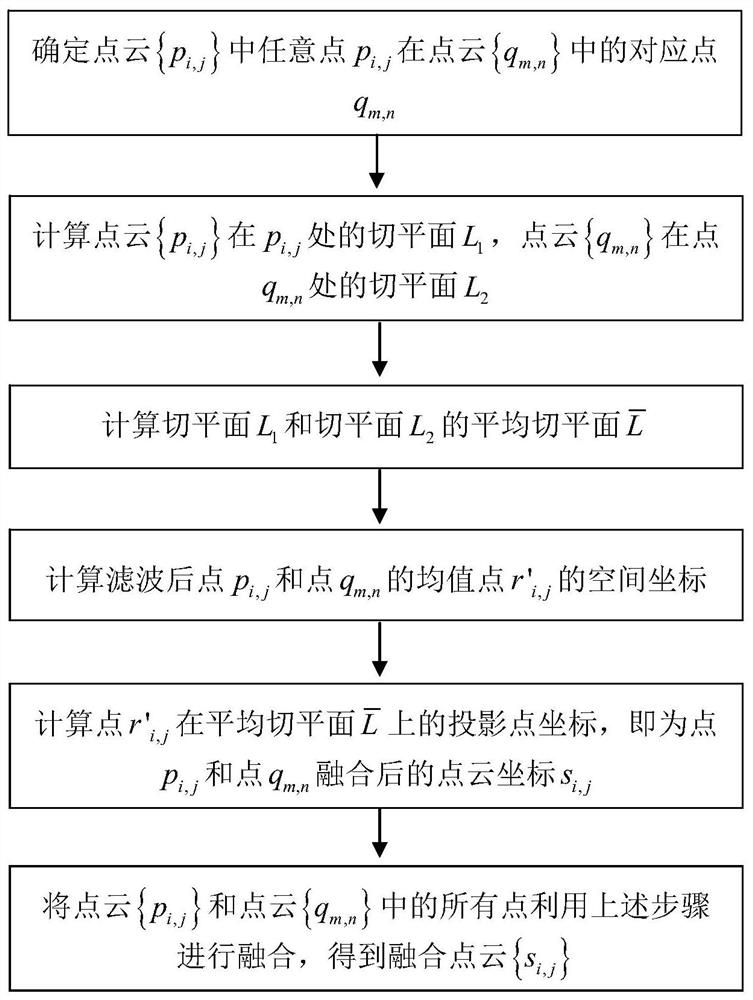
[0175] The specific fusion process is as follows:
[0176] First, the structured light depth camera works to generate a continuous point cloud, from which two sets of point clouds are taken out, which are point ...
Embodiment 2
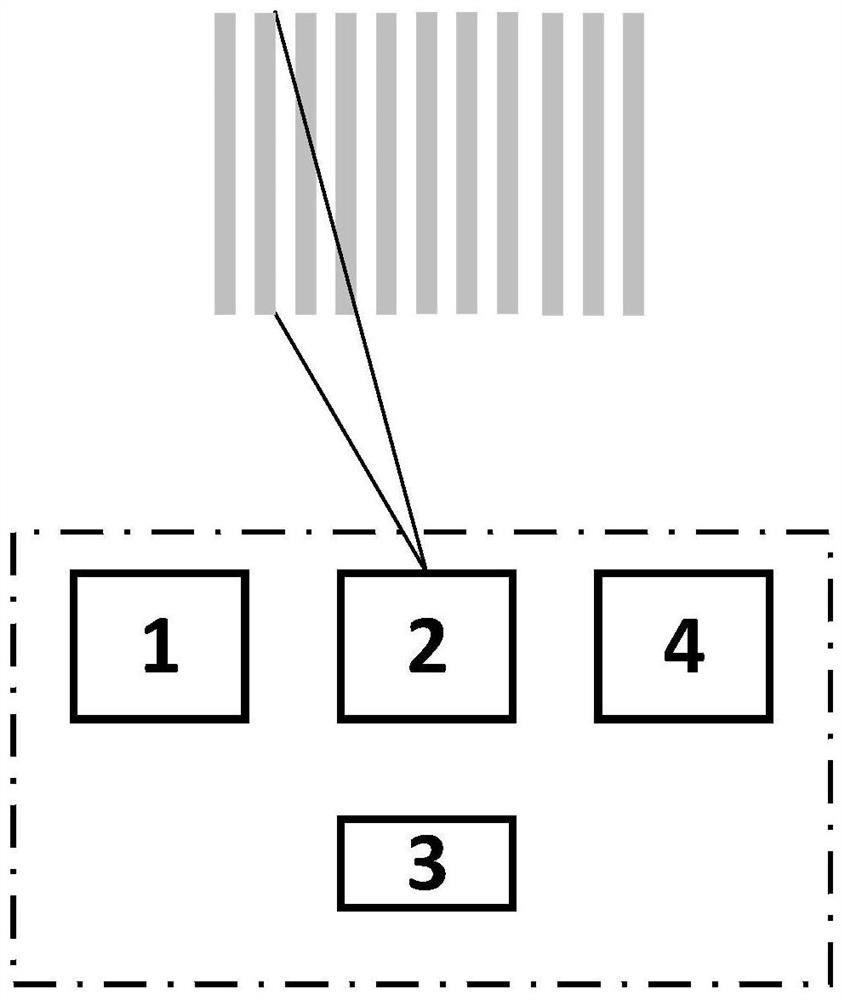
[0201] Such as Figure 2b As shown, different from Embodiment 1, the structured light depth camera involved in this embodiment has one more image receiving module 4, and both the image receiving module 1 and the image receiving module 4 can reconstruct the 3D point cloud of the measured object , the specific fusion process is exactly the same as in Example 1.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More