

Vision-based modular platform relative pose estimation system
A relative pose, modular technology, applied in computing, image analysis, instruments, etc., can solve problems such as large error in attitude information estimation, failure to build a multi-module relative pose system, and failure to build a relative pose system. , to achieve the effect of simple module, improving relative pose estimation ability, and solving target loss
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
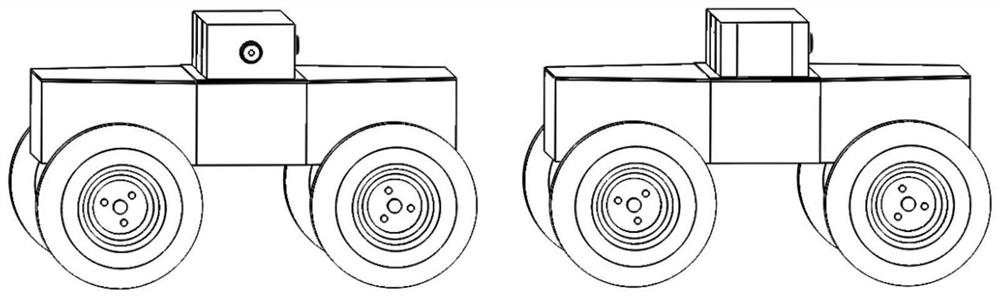
[0051] The modularized platform in the present invention is made up of 4 identical four-wheel mobile robots, adopts the mode of four-wheel differential steering, and is a four-wheel differential steering mobile robot. Each mobile platform (four-wheeled mobile robot) has a camera on the front and right side respectively, and double QR code targets for pose detection on the back and left side respectively. like figure 1 , taking two four-wheel differential steering mobile robots as an example, a 300mm×300mm square box is placed on them to place industrial cameras and dual QR code target modules. The dual QR code target modules are as follows: figure 2 As shown, it consists of two 80mm×80mm two-dimensional codes. Each two-dimensional code represents a different number and can be detected by the ROS node respectively. The distance between the two two-dimensional code targets is 80mm. Encoders are set on the left and right wheels of each four-wheeled mobile robot to obtain the ro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More