Service robot local path planning method based on artificial emotion
A technology for local path planning and service robots, which is applied to instruments, vehicles, two-dimensional position/channel control, etc. It can solve the problem of less consideration of artificial emotions, achieve high friendliness, improve coping ability, and reduce the amount of calculation. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] Below in conjunction with accompanying drawing, the present invention will be further explained;
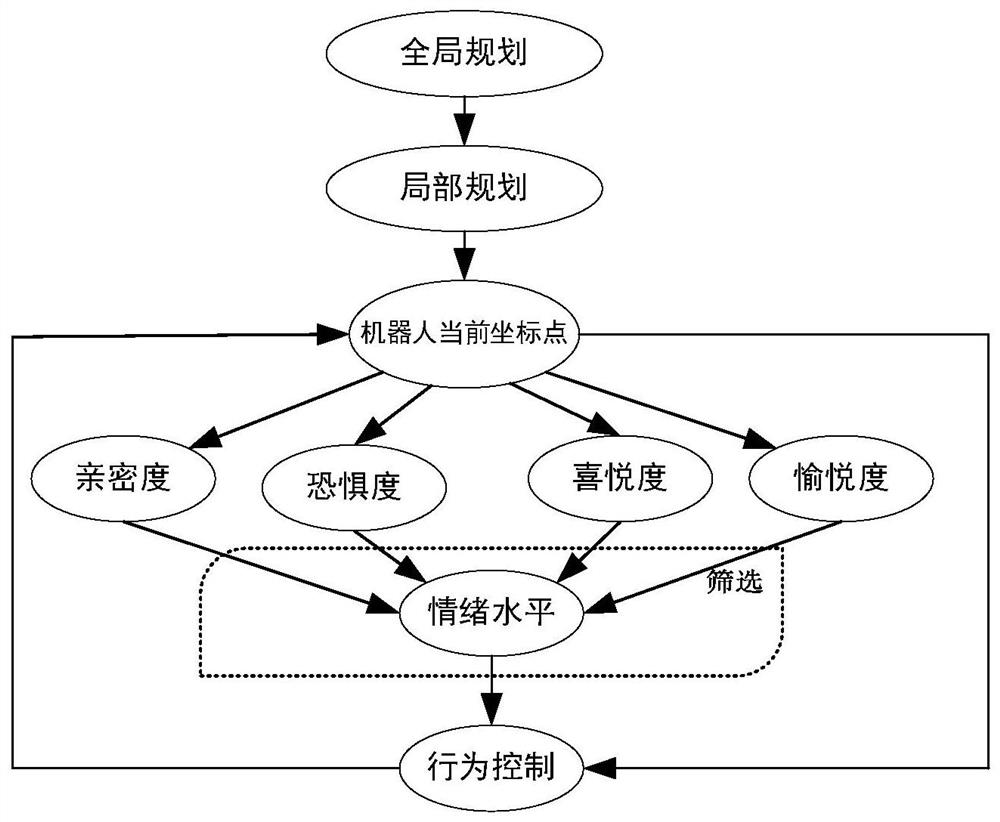
[0052] In this embodiment, a mobile robot and radar are used to build an experimental platform, run ros under the Ubuntu system, set local target points and global target points, and follow the figure 1 The flow shown starts to execute the navigation task.
[0053] Step 1. Map creation
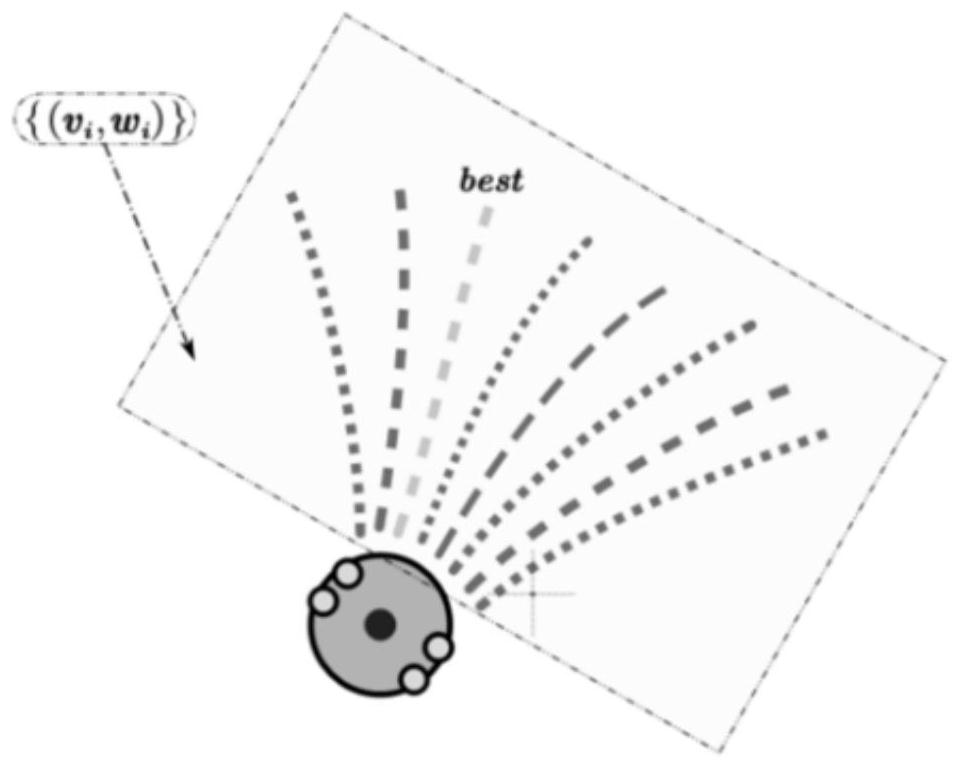
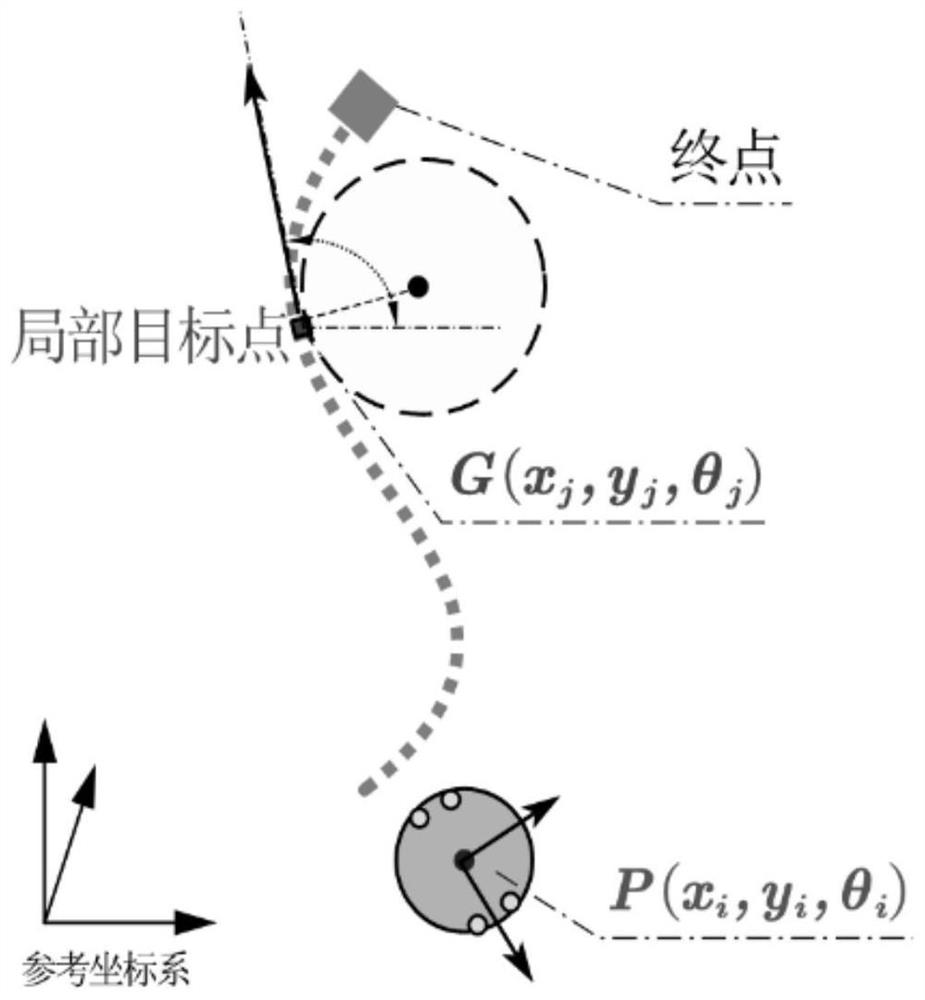
[0054] Use lidar to scan the surrounding environment to build an activity map of the service robot. Set 50 sampling points equidistantly between the service robot and the global target point, and take the 10th sampling point in front of the service robot as the local target point when the service robot is moving towards the global target point. When the number of sampling points between the current position of the service robot and the global target point is less than 10, the global target point is used as the local target point.
[0055] Step 2. Obstacle detection
[0056] The activit...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap