Trajectory planning method and device, motion equipment and computer readable storage medium
A technology of motion equipment and trajectory planning, applied in the field of robotics, can solve the problems of lengthening the overall trajectory planning time, engineering realization limitations, and inability to take into account the accuracy, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0031] The embodiments of the present disclosure provide a trajectory planning method.
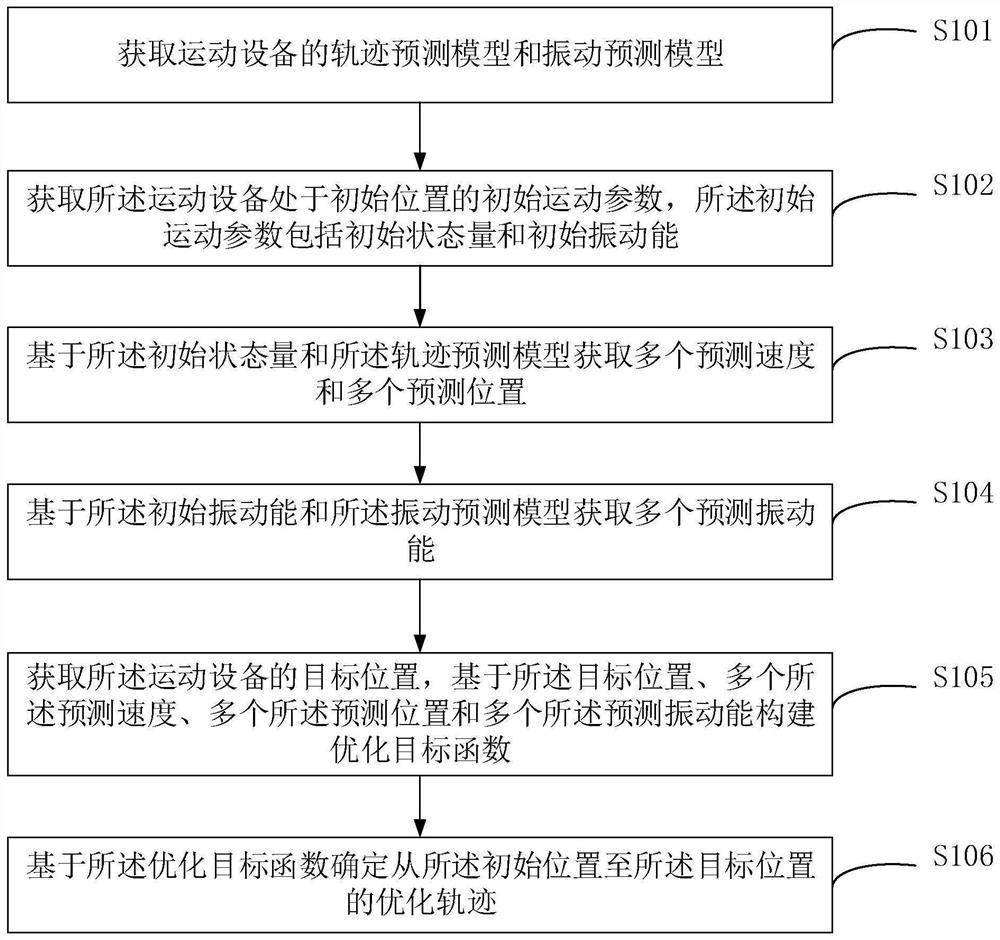
[0032] Specifically, see figure 1 , the trajectory planning methods include:
[0033] Step S101, acquiring a trajectory prediction model and a vibration prediction model of the sports equipment.
[0034] In this embodiment, the motion device may be a mobile robot, a motion mechanism, etc., which is not limited herein. Sports equipment will vibrate during exercise, which will affect the sports equipment. In order to effectively take into account the planning requirements of trajectory planning accuracy, smoothness, and relatively small vibration energy, it is necessary to obtain a trajectory prediction model and a vibration prediction model, combine the trajectory prediction model to predict multiple state quantities, and combine the vibration prediction model to predict multiple vibration quantities. Consider multiple state quantities and multiple vibration quantities for trajectory opt...
Embodiment 2
[0101] In addition, an embodiment of the present disclosure provides a trajectory planning apparatus.
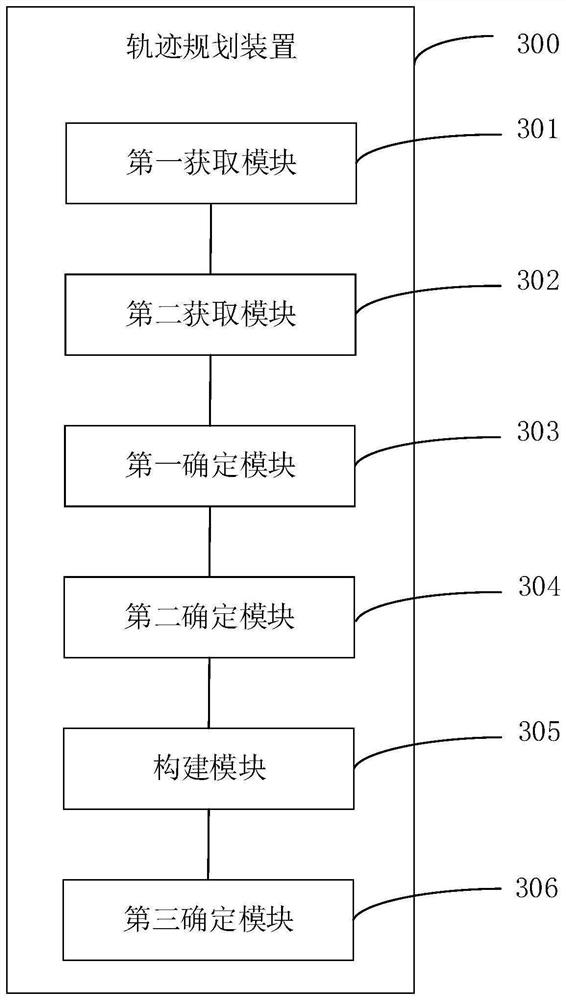
[0102] Specifically, see image 3 , the trajectory planning device 300 includes:
[0103] The first acquisition module 301 is used to acquire the trajectory prediction model and the vibration prediction model of the sports equipment;
[0104] A second acquisition module 302, configured to acquire initial motion parameters of the motion equipment at an initial position, where the initial motion parameters include initial state quantities and initial vibration energy;
[0105] a first determination module 303, configured to determine multiple predicted speeds and multiple predicted positions based on the initial state quantity and the trajectory prediction model;
[0106] a second determination module 304, configured to determine a plurality of predicted vibration energies based on the initial vibration energy and the vibration prediction model;
[0107] A construction modu...
Embodiment 3
[0130] In addition, an embodiment of the present disclosure provides a sports device, including a memory and a processor, where the memory stores a computer program, and the computer program executes the trajectory planning method provided in Embodiment 1 when the processor runs.
[0131] The motion equipment provided in this embodiment can implement the trajectory planning method shown in Embodiment 1, and to avoid repetition, details are not described herein again.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More