Automatic driving track prediction method and device, equipment and storage medium
A technology for automatic driving and trajectory prediction, applied in the field of automatic driving trajectory prediction methods, devices, equipment and storage media, can solve the problems of long time-consuming prediction and difficulty in meeting the real-time performance of prediction, so as to reduce the trajectory prediction time and improve the trajectory prediction efficiency. , the effect of reducing the number of map features
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
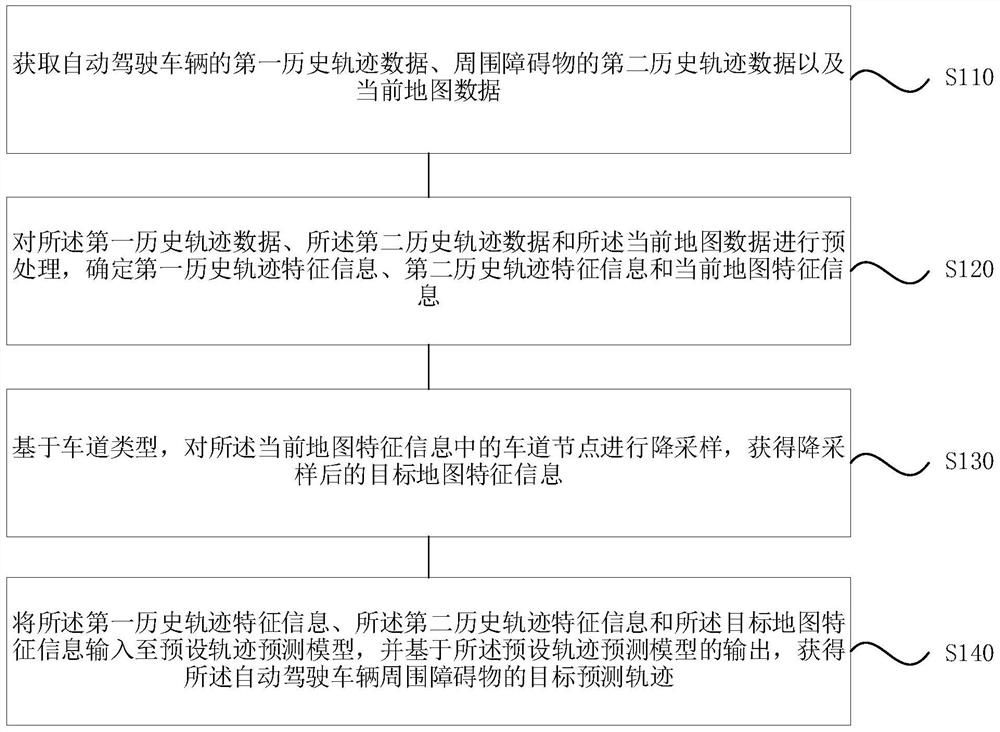
[0033] figure 1 This is a flowchart of an automatic driving trajectory prediction method provided in Embodiment 1 of the present invention. This embodiment can be applied to the situation of predicting the motion trajectory of surrounding obstacles when an automatic driving vehicle is driving. The method can be performed by an automatic driving trajectory prediction device, which can be implemented in the form of hardware and / or software, and the device can be configured in an electronic device of a vehicle. like figure 1 As shown, the method specifically includes the following steps:
[0034] S110. Acquire first historical trajectory data of the automatic driving vehicle, second historical trajectory data of surrounding obstacles, and current map data.
[0035] Wherein, the first historical trajectory data may be historical trajectory data of the autonomous driving vehicle before the current moment when it is driving; the second historical trajectory data may be historical ...
Embodiment 2
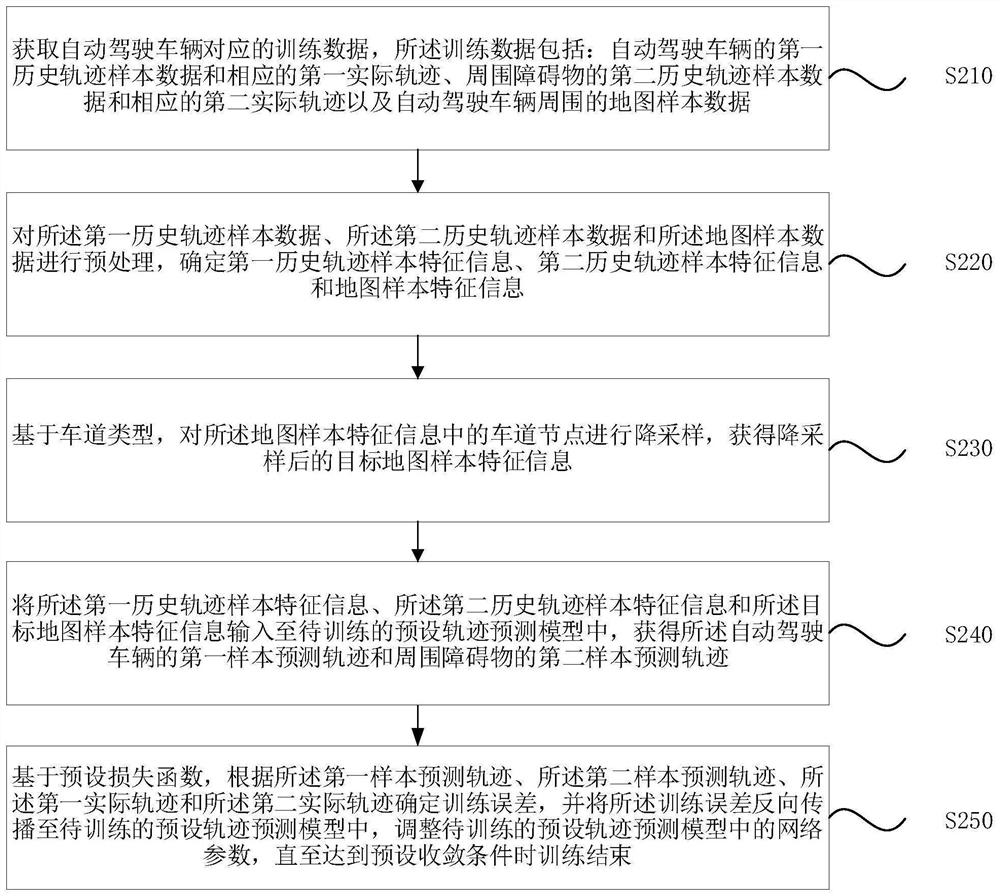
[0066] image 3 This is a flowchart of another automatic driving trajectory prediction method provided in the second embodiment of the present invention. The embodiment adds a training process of a preset trajectory prediction model on the basis of the above-mentioned embodiment. The explanations of terms that are the same as or corresponding to the above embodiments are not repeated here. like image 3 As shown, the training process of the preset trajectory prediction model provided by this embodiment specifically includes the following steps:
[0067] S210. Acquire training data corresponding to the self-driving vehicle, where the training data includes: first historical trajectory sample data and corresponding first actual trajectory of the self-driving vehicle, second historical trajectory sample data of surrounding obstacles and corresponding second trajectory sample data Actual trajectories and map sample data around the autonomous vehicle.
[0068] Wherein, the first...
Embodiment 3
[0105] Image 6 This is a schematic structural diagram of an automatic driving trajectory prediction device provided in Embodiment 3 of the present invention. like Image 6 As shown, the apparatus specifically includes: a data acquisition module 610 , a data processing module 620 , a downsampling module 630 and a trajectory prediction module 640 . in:
[0106] a data acquisition module 610, configured to acquire first historical trajectory data of the autonomous vehicle, second historical trajectory data of surrounding obstacles, and current map data;
[0107] The data processing module 620 is used to preprocess the first historical trajectory data, the second historical trajectory data and the current map data, and determine the first historical trajectory feature information, the second historical trajectory feature information and the current map characteristic information;
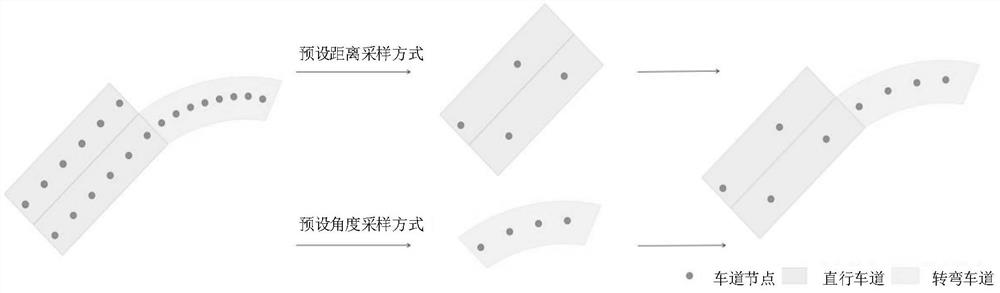
[0108] A downsampling module 630, configured to downsample the lane nodes in the current map fe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com