

Vehicle longitudinal control method, device and equipment and readable storage medium
A technology for longitudinal control and vehicles, applied in the fields of vehicle longitudinal control methods, equipment and readable storage media, and devices, capable of solving the problems of poor longitudinal control accuracy, inability to meet active deceleration control scenarios, and inability to cope with the speed control requirements or distance of intelligent driving vehicles Control requirements and other issues to achieve the effect of improving the longitudinal control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
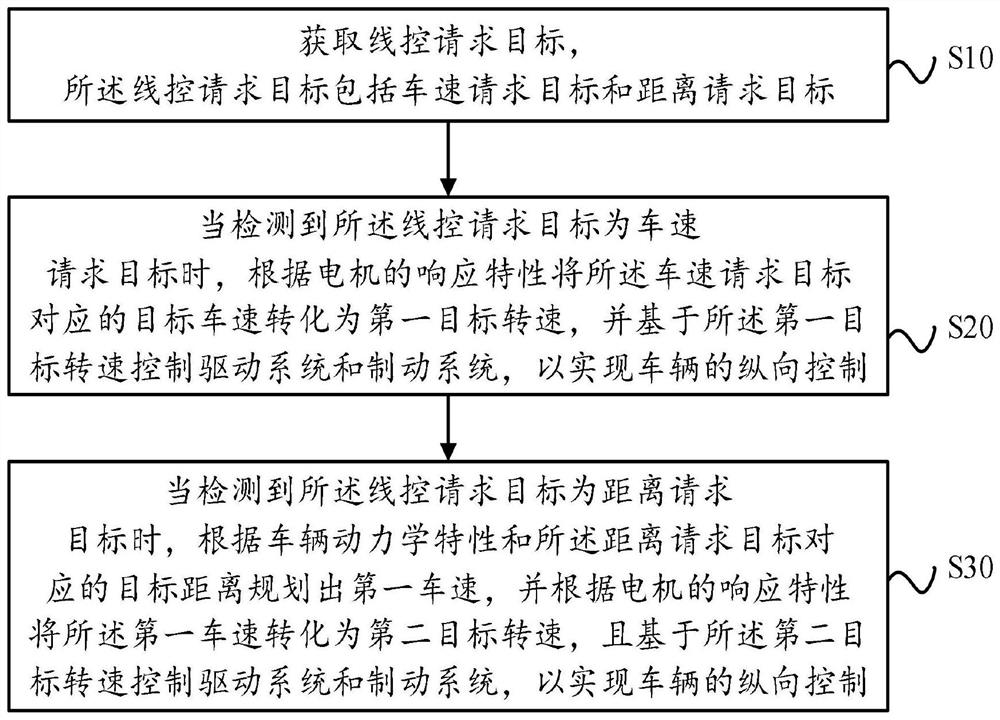
[0079] Embodiment 1: Take parking according to the target distance as an example.
[0080] The first step: analysis of position control requirements, receiving signals such as position control mode, position control enable, target distance and other signals of the bus. When performing micro-position control, the vehicle should meet the following operating conditions at the same time: the vehicle is successfully in gear, the vehicle battery / fuel quantity meets the operating conditions, the vehicle brake system is released, and the accelerator pedal is not depressed.
[0081] The second step: target speed analysis, plan an optimal speed curve according to the target distance and combined with the acceleration and deceleration characteristics of the vehicle, and carry out the speed planning of the starting, driving, coasting, and parking steps to realize the movement of the specified distance.
[0082] The third step: drive system control, convert the target vehicle speed signal ...
Embodiment 2
[0085] Example 2: Take parking according to target operating conditions as an example
[0086] Step 1: Analysis of automation operation requirements, receiving signals such as bus control mode, control enable, target operation condition, cycle number, time, mileage, etc. When performing automatic operation control, the vehicle should have the following operating conditions at the same time: Vehicle The gear is successfully engaged, the vehicle's battery / fuel volume meets the operating conditions, the vehicle's brake system is released, and the accelerator pedal is not depressed.
[0087] Step 2: target vehicle speed analysis, when the standard operating condition mode is triggered, the target vehicle speed associated with time or distance will be automatically output from the stored preset operating condition vehicle speed database; , time, mileage and other information are configured to stop output after a specified cycle period or stop output after a specified running time a...
Embodiment 3
[0090] Example 3: Take parking according to the target speed as an example
[0091] Step 1: Analysis of speed control requirements. If the target speed comes directly from the bus speed target request, that is, the speed control request is directly sent through the bus, the speed control mode, speed control enable, target speed and other signals of the bus are received; The target speed comes from the driver's human-computer interaction interface. The driver selects the target gear through the inching gear switch. When the inching mode is turned on, the vehicle can be controlled to run at the specified speed through the accelerator pedal. The target gear supports calibration configuration (see shown in Table 1).
[0092] Table 1 Mapping relationship between vehicle speed and gear
[0093]
[0094] It can be seen from Table 1 that in each micro-shift gear, the accelerator pedal opening is in one-to-one correspondence with the target vehicle speed, and the target rotational ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More