

Industrial process nonlinear fault diagnosis system and method based on fisher
A fault diagnosis system and industrial process technology, applied in the direction of comprehensive factory control, comprehensive factory control, electrical program control, etc., can solve problems such as poor diagnostic effect and poor applicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
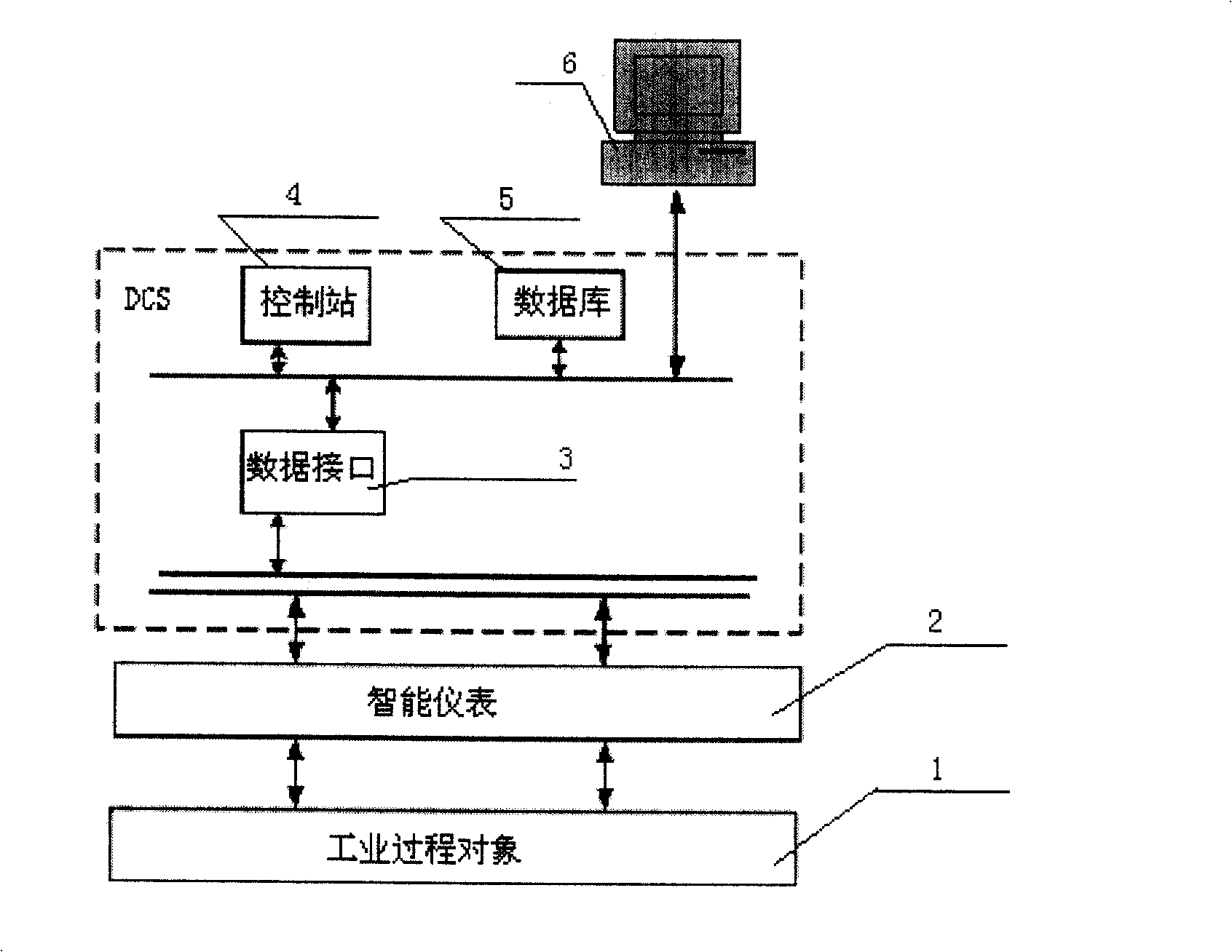
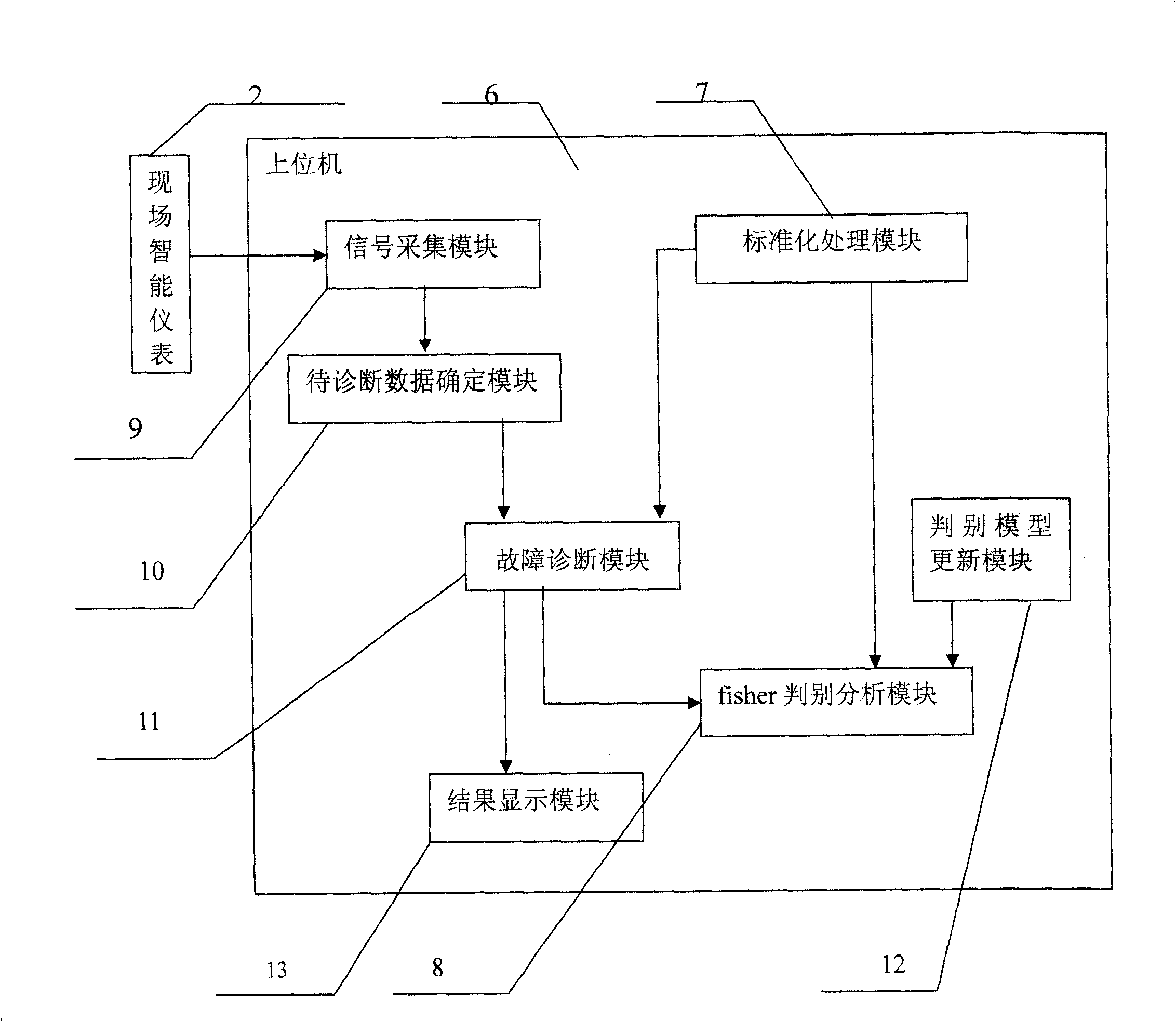
[0051] Refer to figure 1 , figure 2 , image 3 , A fisher-based industrial process non-linear fault diagnosis system, including field intelligent instrument 2, DCS system and upper computer 6 connected with industrial process object 1. Said DCS system consists of data interface 3, control station 4, and database 5. Composition; the intelligent instrument 2, the DCS system, and the upper computer 6 are connected in sequence via a field bus, and the upper computer 6 includes:
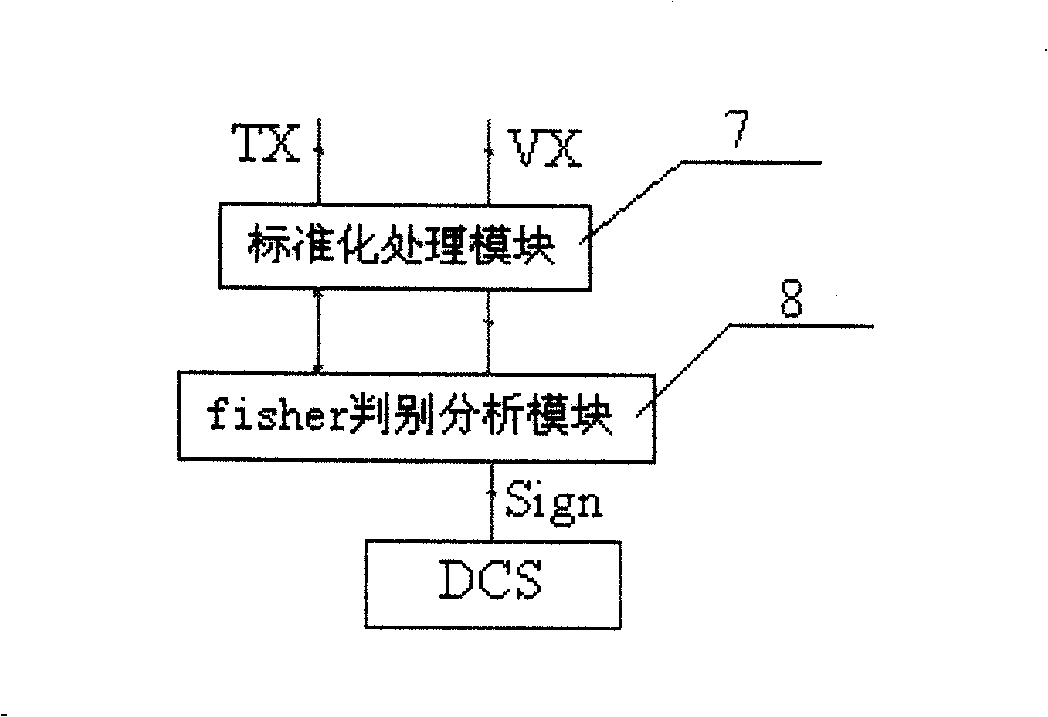
[0052] The standardization processing module 7 is used to standardize the data so that the mean value of each variable is 0, the variance is 1, and the input matrix X is obtained, which is completed by the following process:
[0053] 1) Calculate the mean value: TX ‾ = 1 N Σ i = 1 N TX i , ...
Embodiment 2
[0098] Reference figure 1 , figure 2 , image 3 , A fisher-based industrial process nonlinear fault diagnosis system method. The fault diagnosis method includes the following steps:
[0099] (1) Determine the key variables used for fault diagnosis, and collect the data of the variables when the system is normal and when the system fails from the historical database of the DCS database 5 as the training sample TX;
[0100] (2) In the fisher discriminant analysis module 8 of the host computer 6, set the number of discriminant functions N and other parameters, and set the sampling period in the DCS;
[0101] (3) The training sample TX is in the host computer, and the data is standardized in the standardization module 7, so that the mean value of each variable is 0, the variance is 1, and the input matrix X is obtained, which is completed by the following process:
[0102] 3.1) Calculate the mean value: TX ‾ = 1 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More