

System and method for limiting robot work region
A work area, robot technology, applied in transmission systems, near-field transmission systems, control/regulation systems, etc., to solve problems such as displacement, virtual wall failure, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
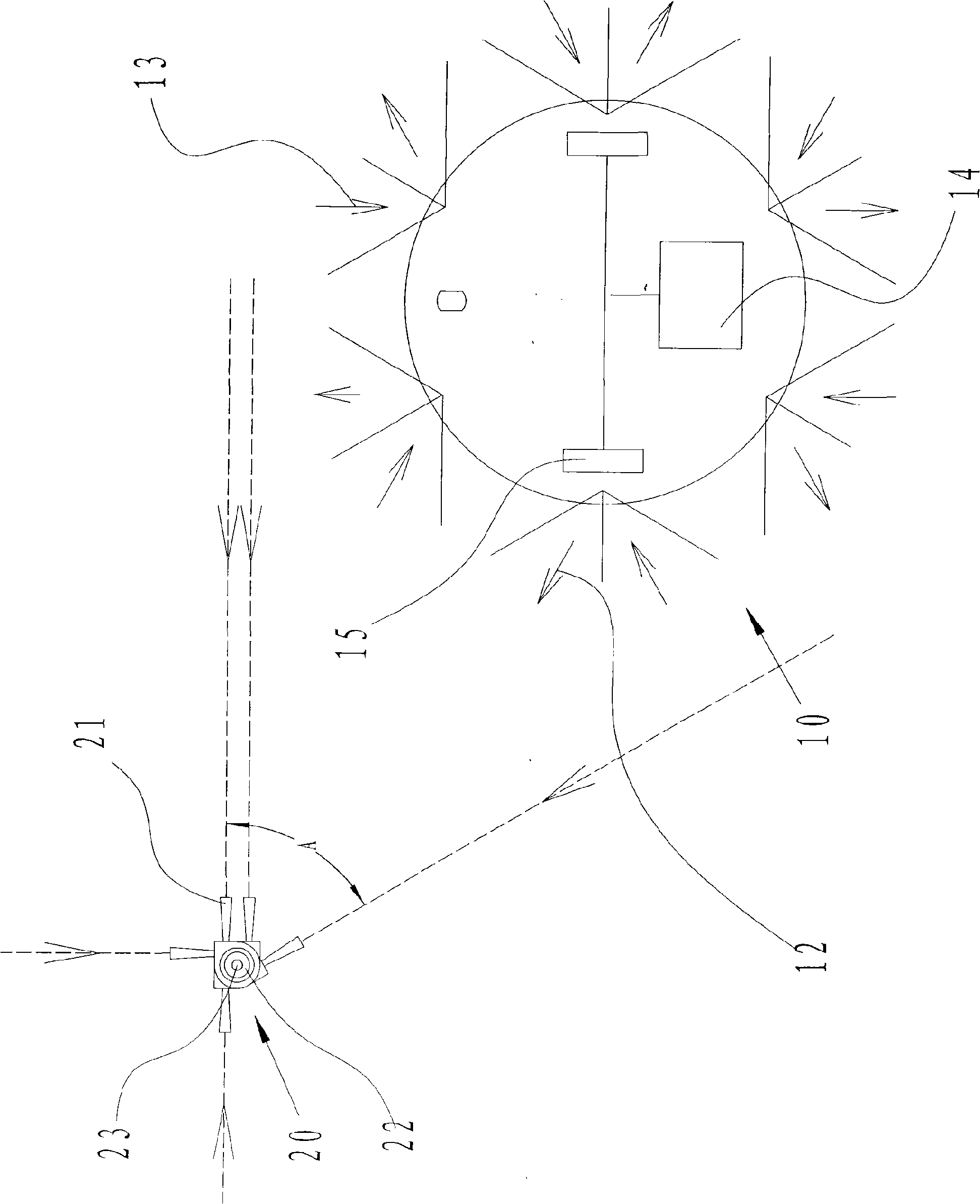
[0015] Referring to the accompanying drawing 1, the robot virtual wall system mainly includes a robot 10 and a transponder 20, wherein:
[0016] The robot 10 has a steering device 15, and has a control unit 14 connected to the steering device 15 for controlling the steering of the steering device 15, and has a first signal transmitting unit 12 for emitting a substantially omnidirectional signal. For signals, the first signal transmitting unit 12 is distributed on the side wall of the robot, and has a second signal receiving unit 13 for receiving substantially all-round signals.
[0017] The transponder 20 has a first signal receiver 21 for mainly receiving the first transmission signal 12 emitted by the robot in a restricted area, the restricted area forms a guided virtual disorientation 24, and has a second The signal transmitter 22 is used to transmit a substantially omnidirectional signal. When the first signal receiver 21 detects the signal transmitted by the first signal ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More