

Movement control method of pectoral fin impelling type machine fish
A technology for motion control, robotic fish, applied in the field of bionics
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The motion control method of the pectoral fin propelling bionic robotic fish based on the central pattern generator model will be described below with reference to the accompanying drawings.
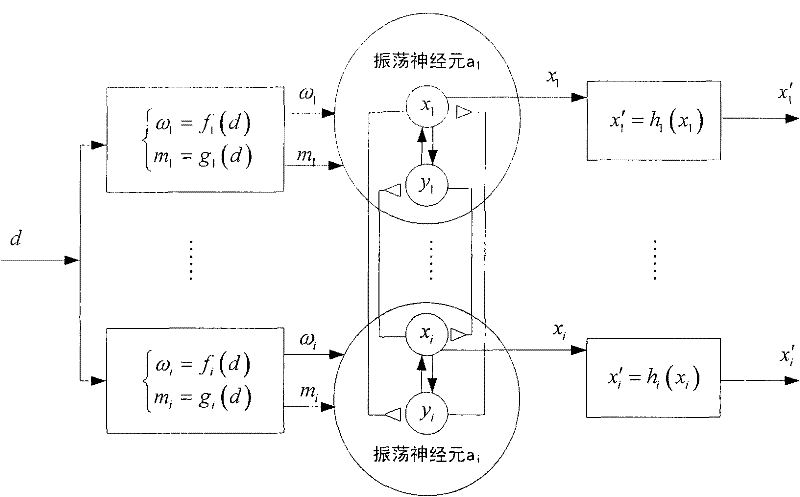
[0018] Such as figure 2 It shows that the present invention is a motion control method of a pectoral-fin propelled robotic fish. Based on the central pattern generator model, a central pattern generator composed of an input saturation function, an oscillation neuron and an output amplification function is proposed to form a robotic fish through mutual coupling. The motor control network; and by changing the coordination relationship between the left pectoral fin central pattern generator and the right pectoral fin central pattern generator of the motor control network, the biomimetic robotic fish can be controlled to achieve multiple modal movements.
[0019] central pattern generator
[0020] The motion control method of the bionic robotic fish utilizes a plurality of central p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More